


什么是无人机避障技能?
望文生义便是无人机自主逃避障碍物的智能技能。许多玩过无人机的小伙伴们 都知道,有避障功用的无人机和没有避障功用的无人机,能够说体会是大不相同的!无人机自动避障体系能够及时地避开飞翔途径中的障碍物,极大地削减因为操作失误而带来的各项丢失。在削减炸机事端次数的一起,还能给无人机新手极大的协助!
无人机避障技能开展阶段和趋势
根据现在无人机避障技能的开展以及其未来的研讨态势,有材料剖析以为无人机避障技能可分为三个阶段,一是感知障碍物阶段;二是绕过障碍物阶段;三是场景建模 和途径查找阶段。这三个阶段其实是无人机避障技能的效果进程。从无人机发现障碍物,到能够自动绕开障碍物,再到达自我规划途径的进程。
或许有人会问无人机到达第一个“发现障碍物”的阶段不就很简略避开障碍物了?这第二个阶段是不是有些剩余!其实不然,无人机避障的三个阶段的区分都是有技能作为根据的。其每个阶段详细的技能剖析如下:
第一阶段,无人机只能是简略地感知障碍物。当无人机遇到障碍物时,能快速地辨认,并且悬停下来,等候无人机驾驭者的下一步指令!
第二阶段,无人机能够获取障碍物的深度图象,并由此准确感知障碍物的详细概括,然后自主绕开障碍物!这个阶段是脱节飞手操作,完成无人机自主驾驭的阶段!
第三阶段,无人机能够对飞翔区域树立地图模型然后规划合理线路!这个地图不能仅仅是机械平面模型,而应该是一个能够实时更新的三维立体地图!这将是现在无人机避障技能的最高阶段!
现在,市面上干流的电动多旋翼无人机避障体系首要有三种,分别是超声波、TOF(激光雷达测距的一种)以及正有望成为干流的视觉测距。以下是国内外无人机避障技能最新运用事例。
1、零度Xplorer 2:激光雷达TOF测距
TOF是TIme of flight的简写,直译为飞翔时刻。所谓飞翔时刻法3D成像,是经过给方针接连发送光脉冲,然后用传感器接纳从物体回来的光,经过勘探光脉冲的飞翔(往复)时刻来得到方针物间隔。
运用这种方法光波简略遭到搅扰,体系宣布的光,有必要避开太阳光的首要能量波段,然后防止太阳光的直射、反射等对避障体系形成搅扰。该原理需求十分精准的时刻丈量,需求专用处理芯片,而芯片价格则较为昂扬。
零度在CES2016上发布的Xplorer 2,选用的便是TOF测距计划。无人机上的“蘑菇头”便是自动避障模块,该避障模块能够完成在6m有用避障间隔内,以每秒50次的速率完成360°全方位扫描。

Xplorer 2自动避障模块
2、昊翔Typhoon H:Realsense(单目+结构光)
Realsense 的技能原理是,它选用了“自动立体成像原理”,仿照了人眼的“视差原理”,经过打出一束红外光,以左红外传感器和右红外传感器追寻这束光的方位,然后用三角定位原理来核算出 3D 图画中的“深度”信息。经过配有深度传感器和全1080p五颜六色镜头,能够准确辨认手势动作、面部特征、远景和布景,从而让设备理解人的动作和情感。据 Intel方面对外泄漏的数据,Realsense的有用测距可达10米。
Realsense归于“单目+结构光”,即单个摄像头加结构光 发射器构成深度摄像头。不过结构光却是个“见光死”,“结构光只合适暗环境、室内。为啥intel弄个仿热带雨林的暗环境?因为会遭到搅扰啊!”雷动云合 创始人廖鸿宇说,因为将3D深度摄像头改为2D深度摄像头,其“单目+结构光”的智能导航模块只需200元。

Typhoon H整合了Intel的Realsense模块
3、大疆精灵Phantom 4:双目视觉+超声波
双目的测距原理,就像咱们人类的两个眼睛,看到的图画不相同,假设同一个点,两个眼睛看到两张图画是存在差异的,而经过三角测距是能够测出这个点的间隔。
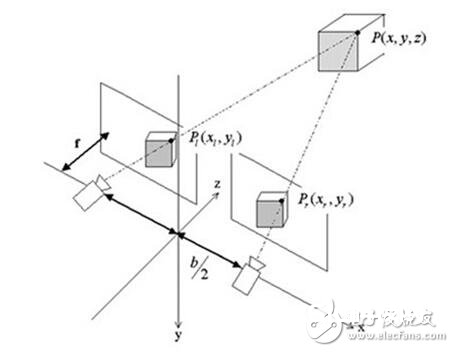
双目视觉体系原理图
Phantom 4增加了双目避障,其实是沿用了guidance的中心算法,能够辨认最近0.7米,最远15米的障碍物;水平视角 60°,笔直视角为30°。双目视觉的优势体现在,在远间隔,双目视觉能确保三维精准信息,比方远处的两座山能看出一个近一个远。当然,远处的小方针是不能够的。

Phantom 4 下视视觉定位模块
4、极飞:夜间避障选用自动近红外照耀技能
极飞做夜间避障是因为他们的大都植保作业是在夜间进行。其实他们完成夜间避障的原理并不杂乱。
先说避障原理,向前避障是双目避障,它使用成像设备的两只眼睛来获取被测 物体的两幅图画,经过核算图画对应点间的方位误差来获取物体的三维信息,包含摄像头与物体的间隔和物体之间的间隔等。是根据视差原理,是核算机视觉的一种重要方式,这和人眼感知物体三维信息的原理类似。参照下面这个风趣图片。
而夜间避障是选用了这个自动近红外照耀技能,简略来说便是加了一个特别的手电筒和并改造了眼睛。夜间这个眼睛简直看不到(和现有大疆产品相同),而极飞选用的双目是由两个是非镜头组成,从380-1080nm 波段都能够成像,也就意味着不只能看见可见光,还能看见人眼也看不见的红外线。

(中心长条装为发射,两边为接纳)
无人时机自动发射近红外线光线,近红外光是介于可见光和中红外光之间的电磁 波,尽管人眼看不到,但能作为夜晚的光源,双目的每一个镜头就能接纳到环境中的红外线的反应,经过双目核算后(和白日的核算处理相同)就能够「感知」到环境和障碍物了。并且避障间隔和白日比较没有改变,都是 30 米(视点:水平 FOV 65°)。
其实这个原理并不是极飞所发明,它在军事傍边运用很早,在美、德等国二战期间,第一代的自动红外勘探设备用在了战场上,经过自带的光源设备自动发生近红外辐射照耀方针区域,然后接纳方针回来的红外信号,转换为可视图画进行调查剖析。例如德国研发的车载自动红外夜视仪可用于夜间无灯火条件下荫蔽跋涉,并经过这种手法避开同盟国的监督,秘密地把 V-2 导弹运送到前哨。
而提到这儿,现在一切的民用无人机都不能在夜间或者说光线欠好的情况下避障吗?其实不然,咱们能够看看那些原本见光死的避障无人机,在晚上是不是能够活过来。
5、美国俄亥俄州的公司Oculii:四维雷达技能
传统的民用雷达大多只能供给二维的信息,可是,人们都日子在三维的空间里,二维信息是远远不够的。举例来说,现在的民用雷达都无法丈量车子的高度,而这关于无人驾驭、无人机等方面的运用就有很大的局限性。坐落美国俄亥俄州的公司Oculii,开发了世界上第一个能够商用的四维雷达,使得无人机在三维空间,获取上下左右的空间信息。
小结:未来无人机不只会采纳单一技能完成避障功用,或许会采纳多种避障技能集成的手法来完成不同场景下的避障。






