


指纹辨认进程同一切的生物体特征辨认的进程类似,分为用户注册和特征匹配2个部分。首要,需求录入指纹图画,对获取的原始图画进行处理,包括图画增强、切割、细化、二值化等。然后,对指纹的细节特征进行提取,比较常见的特征点有分叉点、端点,最终,生成模板储存在体系数据库中。无论是验证或许辨识的进程,都需求将待辨认的用户的指纹图画再一次进行相同的图画切割、细化、二值化、特征提取等一系列进程,生成和数据库模板相同的数据格式,最终,进行比对,得出辨认的成果。
现有的指纹辨认算法的前提条件是运用相同的指纹辨认器上收集指纹或认证。所以,在网上的许多用户只能用同一类指纹辨认器才干完成认证,实践证明:假如换作不同的指纹辨认器,验证体系的功能将大大下降,这是由于指纹辨认器没有规范的交换规矩。
由于各种辨认器的运用算法的不同,要运用指纹辨认器的各体系需求单个的登录,并且,认证时有必要运用与登录时运用的辨认器类型相同。这阐明个人和体系需求保存多个不同品种的辨认器。处理不同辨认器之问的通用算法就成为现在研讨的一个很有含义的课题,这样,用户能够在自己的电脑上运用不同的辨认器,方便了在线指纹验证体系的运用价值 。
由于某类指纹传感器只是适宜同品种型的收集仪验证运用,为了答应更多的用户运用和阻挠冒充用户企图诈骗体系,多传感器指纹交融进步体系的功能显得很有必要。本文提出一种简略的交融战略研讨了两类常用的指纹传感器一光学传感器和电容传感器。两类传感器别离收集两幅图画后通过预处理程序提取细节点后别离与模板指纹相匹配,得到2个匹配分数,然后,把这2个匹配分数通过交融规矩得到最终的匹配分数,通过与单一传感器功能比较标明:交融后的成果对体系的功能有了很大的进步。
1 提出的交融结构
图1为提出的多传感器指纹验证体系结构图 。首要,通过光学和电容传感器收集用户的指纹图画。然后,对图画进行预处理和别离提取两类传感器收集的指纹图画的特征,依据细节点的匹配算法被别离使用到光学和电容细节点集,因而,有2个匹配分数,并运用交融规矩交融这些分数。
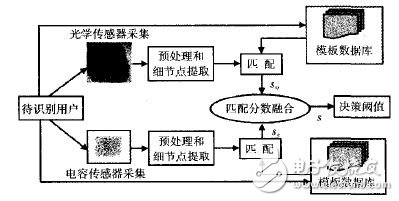
图1 多指纹传感器验证体系结构图
1.1 指纹传感器的类型和作业原理
由于当今指纹传感器规范许多,可是,至今依然没有一个恰当和共同的协议和规范。现在,市场上现有的传感器主要有光学传感器和电容式传感器两类。
1.1.1 光学传感器作业原理
它的根本原理如下:将手指按压在玻璃平面的一侧,在玻璃的另一侧装置有LED光源和CCD摄像头,LED宣布的光束以必定的视点照射向玻璃,摄像头用于接纳从玻璃外表反射回的光线。手指上的脊线与玻璃外表触摸,谷线不与玻璃外表触摸,因而,照射在指纹脊线所触摸部分的玻璃外表的光线被漫反射,而照射在指纹谷线所对应的玻璃外表的光线被全反射,然后在由CCD摄像头捕获的图画中,对应指纹脊线的部分色彩较深,对应指纹谷线的部分色彩较浅。
1.1.2 电容传感器作业原理
电容传感器原理依据按压到收集头上的手指的脊和谷在手指表皮和芯片之间发生不同的电容,芯片通过丈量空间中的不同的电磁场得到完好的指纹。由这一结构原理,能够大大地进步指纹的防伪性。假造的指纹一般用硅树脂或许白明胶等绝缘材料,在电容传感器上是无法成像的,这样使假造的指纹无用武之地。但电容技能的芯片贵重,且易遭到搅扰。
1.2 指纹图画处理
在该辨认进程中,首要,通过指纹收集仪器收集到指纹 J,由于收集指纹图画时图画质量不高或许在捺取指纹进程中因用力不均形成指纹畸变,常常会形成指纹图画切割的不精确,给后续的指纹辨认带来更大的困难,形成指纹主动辨认体系的拒识或误识,所以,指纹收集后的第一个关键技能便是对收集到的指纹图画进行预处理,包括对指纹图画的增强、二值化和细化等。预处理完成后即可进行特征提取,然后,进行特征匹配,输出匹配成果,如图2。
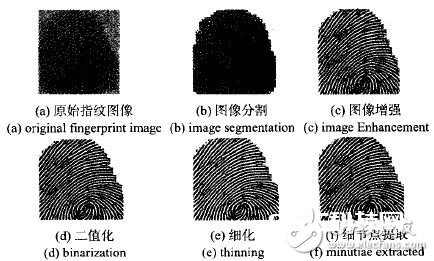
图2 指纹图画预处理进程
最终,细节点被提取出来,细节点界说为:端点和分又点(如图3),纹线端点是一条纹理的终结点,而纹线分叉点是一条纹理再次分隔成为两条纹理的点。这2种特征点在指纹图画中呈现的几率最大、最安稳,易于检测,并且,足以描绘指纹的唯一性。

图3 指纹细节点类型
两幅指纹图画的匹配主要是处理旋转、平移和形变等问题。本文中,指纹匹配的输入是2个特征点的点集尸与Q,其间一个点集P是从输入的指纹图画中提取出来的,另一个点调集Q则是预先从规范的指纹图画中提取出来储存在模板库中。这2个点调集别离标明为
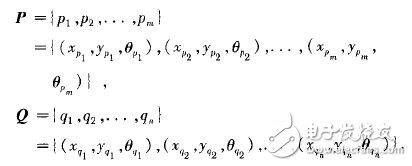
其间,![]() 记载了点集P中第i个特征点的3条信息: 坐标、Y坐标与方向,
记载了点集P中第i个特征点的3条信息: 坐标、Y坐标与方向,![]() 则记载了点集Q中第j个特征点的3条信息:x坐标,y坐标与方向。假定两幅指纹图能够彻底匹配起来,则可通过对输入的指纹图作某种改换(旋转、平移与弹性)得到模板中的指纹图,因而,点集P能够通过旋转、平移与弹性等改换近似成点集Q。
则记载了点集Q中第j个特征点的3条信息:x坐标,y坐标与方向。假定两幅指纹图能够彻底匹配起来,则可通过对输入的指纹图作某种改换(旋转、平移与弹性)得到模板中的指纹图,因而,点集P能够通过旋转、平移与弹性等改换近似成点集Q。
为了能够将输入指纹图画中的某一个特征点依照必定的改换办法转化成模板指纹图画中的相对应方位,需求知道相应的改换因子,△x与△y别离为x,y方向上的平移因子,△θ则是旋转因子。匹配基准点确实定是通过判别这2个三角形的类似程度得到的,在求取了两幅指纹图画之间的匹配基准点和改换因子后,本文对待辨认指纹相关于模板指纹进行旋转、平移改换,以便判别两枚指纹是否来自于同一个手指。在本文中,求取改换后的待辨认指纹的特征点坐标方位和所在区域的纹线方向。然后,将改换后的待辨认指纹特征点集叠加到模板指纹特征点集上,检测2个特征点调会集相重合的特征点数目。由于本文中的匹配是一种非精确匹配,即使是一对匹配的特征点对,它们之问也不会彻底重合,总是在方位、方向上存在有必定的误差,所以,有必要有必定的误差容忍度。
为此,本文选用一种称为界定盒的办法。对模板指纹特征点会集的每一个特征点,选取它周围的一个矩形区域作为它的界定盒,只需改换后的待辨认指纹中的特征点通过叠加后落在这个区域之内,并且,方向根本共同,能够以为这2个特征点对是一对匹配的特征点。
最终,算法核算一切相匹配的特征点数目,通过式(1)转化成匹配分数,其间,maxscore是通过叠加匹配的细节点个数得到的最大匹配得分,Temp—Num和Input—Num别离是模板和输入指纹的细节点数目

核算的匹配分数代表了相比较的两幅指纹的类似程度。参数值越大,类似性程度越高,而假如得分较小时,阐明这一用户不必定是其声称的用户,拜访将被回绝。
本文所运用的算法是一种典型的依据特征点坐标模型的点形式匹配算法。它对匹配进程中最难的一步一基准点确实定和改换参数的求取作了较深化的研讨,依据3个近邻的特征点之间的相互联系来确认基准点、求取改换参数。该算法在必定程度上能够加速基准点的求取,然后进步整个匹配算法的速度。一起,该算法是依据多点来确认改换参数,而不是一般含义上的一点,在必定程度上能够消除在特征提取进程中所引进的方位、视点的误差,得到更为精确的改换参数。
1.3 光学和电容传感器的交融
So, Sc是别离由光学传感器和电容传感器收集的图画运用匹配算法所取得的匹配分数,s交融后的分数和S。So, Sc之间有如下联系
![]()
将S和设定的阈值相比较:if:S > threshold体系答应进入,为真;不然,体系回绝该用户,当然,上述办法也可用于2只以上的,。
依据方程(2)研讨了两品种型的匹配分数转化履行交融规矩,第一品种型交融规矩归于所谓的固定交融规矩,由于它们不需求参数估计,特别研讨了两类传感器的匹配分数中值

第二种交融是所谓的练习样本规矩,由于它们需求为了取得抱负的阈值分数而让样本通过屡次练习,选用公式(4)练习样本
![]()
式中W0,W1,W2为权值向量,显着,中值交融的作用要差于逻辑交融,逻辑交融的进程便是以中值为根底,通过屡次迭代,总能找到一组适宜的权值向量(W0,W1,W2),使得阈值分数S接近于最佳值。
2 试验成果
随机抽取20个人,每个人运用3个手指,别离为大拇指、食指、中指,运用光学和电容传感器,每个手指按压10次,每个人收集到的指纹数为6&TImes;10=60,共有指纹20&TImes;60=1200。关于每一个验证算法两类调集的匹配分数。第一次匹配称为“真实匹配分数 (真实用户之间)G调集,第2次是“假匹配分数”(“冒充用户之问”)I调集。
随机细分以上集为2个巨细相同的调集:G=G1 U G2,I=I1 U I2,G1, G2和I1, I2别离是G和I的别离调集。练习调集Tr={G1,I1}用于核算逻辑交融规矩的权重,测验调集Tx={G2,I2}用于点评和比较算法功能。它包括以下几个目标:
练习样本调集的等过错率(EER),也便是确实实用户被体系过错回绝的百分比(FRR)等于冒充用户被体系过错承受的百分比(FAR)。
表1总结了核算练习样本的EER与测验样本的FAR和FRR的成果。
表1 单一传感器和多传感器交融核算成果的目标EER。FAR,FRR
从表1可知,电容传感器功能显着差于光学传感器。其原因主要是电容传感器收集图画时的触摸面积远远小于光学传感器。直接导致了其收集的图画提取的细节点数目少,因而,提取的细节点不能互相正确的匹配。
从等过错率核算的交融成果来看,功能也有很大的进步,逻辑交融削减EER从3.6%到2.9%。测验样本的成果也标明交融进步了体系的鲁棒性,实际上,在逻辑交融(表1第5行)今后,练习样本的功能(表1第2列)和测验样本的功能误差(表l第3列和第4列)大大减小了。
该试验成果与Gian Luca 试验成果比照,发现得到的成果目标低于文献[7]的目标,其间原因或许是本文运用的收集器功能比较差,致使取得的指纹图画质量不行抱负而导致目标稍弱,别的,或许便是本文运用的算法取得的匹配成果不行抱负。
3 定论
本文提出了依据光学和电容传感器多传感器指纹验证体系。试验成果标明:验证后的多传感器体系功能优于最好的单一传感器陛能(光学传感器),并且,光学和电容传感器匹配器两者之间的互补性也标明晰多传感器交融的或许性,从理论上来说体系自身也取得了很低的验证过错率。特征提取进程被别离使用到每一个收集设备收集到的图片,使用一个简略的交融规矩,进步体系的验证功能。因而,交融不同类型的传感器进步体系功能计划简略易行。






