


星灵敏器是以恒星为参照系,以星空为作业目标的高精度空间姿势丈量设备,通过勘探天球上不同方位的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器供给精确的空间方位和基准,而且与惯性陀螺相同都具有自主导航才能,具有重要的使用价值。
星灵敏器的研讨开展与使用已历经半个多世纪,跟着新材料,新器材的呈现和工艺技能的前进,精度进步,功耗减小,本钱下降,使用领域日益广泛的新式星灵敏器不断推出。因而,及时收集整理剖析比较国外星灵敏器的信息,有利于国内有关姿势丈量操控技能的开展。
在未来星灵敏器应该会得到广泛的使用,跟从小编一起来了解一下关于星灵敏器的作业原理吧。

星灵敏器作业原理
CCD 星灵敏器主要由外围电路部分,信号检测部分,模仿信号处理部分,数据收集存储部分、数据处理部分以及对外接口部分组成。
信号检测模块包含遮光罩、光学 体系、CCD 探头线路、CCD 光电转化器和光学镜头号几个部分,被捕获到的星体通过光学镜头进行成像,然后由 CCD 组件把星体的光能量转化为模仿电信号,把此电信号再进行处理后,送入数据收集存储部分再进行模数转化与数据收集处理。
当 CCD 摄像头捕获到的星图按数字的方法存储于内存中时,数据处理模块便会对现已数字化后的星图进行星点提取和星点坐标核算以及星图辨认处理,并将星体所构成的像点与导航星库进行匹配,经剖析可得到与像点彼此对应的星体在天球坐标系中的方位坐标,终究由此指向完结载体姿势终究的确认。
其具体作业原理如下,首要星灵敏器将捕获到的星图与导航星基准库进行比对,然后使用辨认技能得出星图中的恒星体在天球坐标系下的坐标:
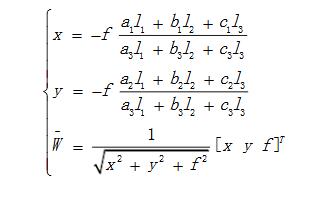
天球系下恒星体的坐标投影到像空间系为:
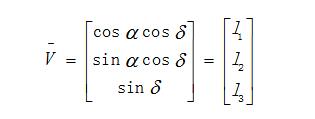
星灵敏器的灵敏光轴在天球坐标系下的坐标(α,δ)为:
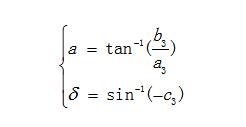
其间,f 表明星灵敏器的相机主距;α,δ表明天球的赤经,纬经;l 表明加速度计到原点的间隔;a,b,c 表明载体坐标系。






