作者:Kaustubh Gandhi,Bosch Sensortec软件产品司理,与Bosch Sensortec传感器数据交融软件体系工程师Amithash Kankanallu Jagadish合著
简介
无论是智能手机、可穿戴设备、虚拟实践耳机,仍是机器人吸尘器,当今用户都希望并要求这些设备一直依照指令运转,并平稳、精确地习惯不断改动的周围环境。这需求精确的感测俯仰、滚转和航向方向,而这些则是经过从设备内置的加速度计、陀螺仪和磁力计搜集的数据交融完成的。
一般在实践国际中,事物永久不会像其看起来那么简略,例如,精确确认航向(观测)方向就是一项巨大应战,由于磁力计丈量遭到邻近多个物体的负面影响。这些搅扰性磁场影响,一般称为硬铁和软铁歪曲,或许由坐落设备本身内的各种元件和用户周围环境中的外部磁性物体引起。
本文旨在深化洞悉和了解在当今电子消费设备中取得牢靠传感器数据所需的有用规划技能和软件解决方案,并进步用户对终究产品的满意度。本文将供给强壮传感器数据交融技能的示例,例如根据在规范运用期间取得的陀螺仪信号,对预算磁力计偏移加以运用,及其对用户相关特征(例如行人和头部盯梢)的影响。
磁力应战
您是否曾由于智能手机导航运用程序给出了过错的指示,而找错了环岛出口?运用虚拟实践耳机时,您是否经历过忽然的晕厥?或许您的“智能”机器人吸尘器是否一再被卡在角落里?这些问题中的大多数,至少部分,是由不精确的惯性传感器数据交融导出的不正确航向信息所形成的。那么,为什么最先进的高精度传感器仍然会记载不精确的信息,而且发生如此大的差错?
在试验室外,所谓的地球稳定磁场的刚性磁线不断被各种物体修正,如门框、桌子、椅子和其他金属物品。根据其特定磁特性,这些物体经过称为硬铁和软铁歪曲的现象改动其周围的磁场。
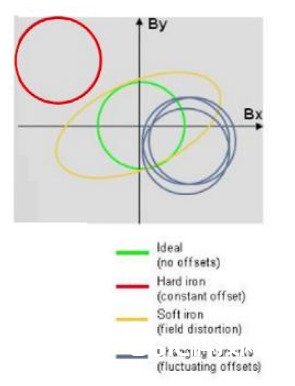
图1:罗盘差错的来历:外部磁场
比如NdFeB、AlNiCo等硬磁资料(“硬铁”)引起高剩余B场或“磁回忆”,而软磁资料(“软铁”)则一般是比如铁(Fe)、镍(Ni)等资料及其合金。
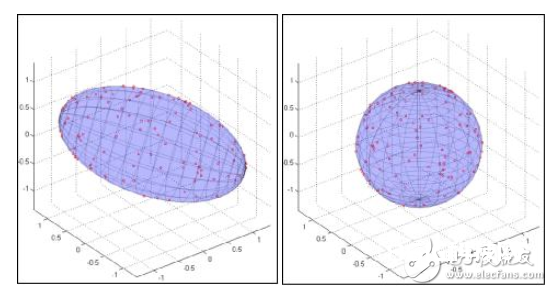
当磁力计用于设备中时,硬铁歪曲由发生磁场的物体形成,例如扬声器内的磁铁,由此导致传感器输出中称为“稳定偏移”的差错,然后需求对其进行补偿。另一方面,软铁歪曲则是由“被迫”影响或歪曲其周围磁场但本身不一定发生磁场的物体形成的,例如存储卡插槽、电池、无线天线、门窗结构和各种其他周围环境中的规范目标。这种类型的歪曲改动了磁球的实践形状,而且很大程度上取决于资料相关于传感器和磁场的定位。
如图2所示,在典型的室内区域,由于一般物体引起的磁场歪曲,罗盘方向改动很大,即罗盘的赤色“北”针指向各个方向。
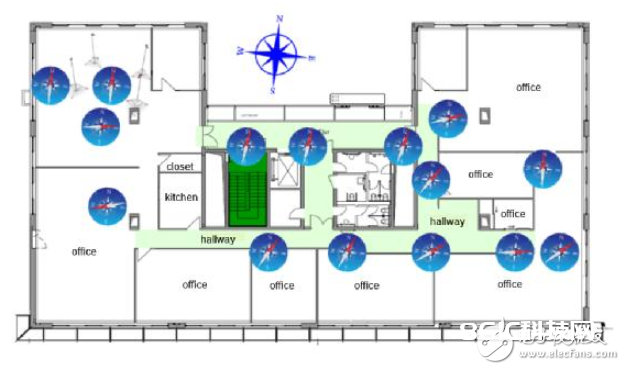
图2:典型室内区域传感器读数(磁力计)的改动
因而,补偿硬铁和软铁歪曲关于取得有意义的磁力计读数至关重要。这种补偿需求在设备规划期间进行杂乱的程序,而且在实践运用期间将成果结合到传感器的软件中,如下文中的进一步描绘。
承受歪曲
以下体系办法可用于补偿影响磁力计读数的失真:
·运用软铁矩阵在规划阶段进行补偿
·经过规范“八字形动作”在运用中校准软件
·经过“天然运用动作”智能校准软件
运用软铁矩阵在规划阶段进行补偿
来自坐落终端设备(例如智能手机)内部部件的软铁歪曲是稳定的,因而能够经过运用一次性解决方案来补偿。这种补偿需求所谓的“软铁补偿矩阵”(SIC Matrix),对此,规划者在设备中具有更广泛的布局选项。这些补偿后传感器的读数具有显着更高的精度,与未补偿读数比较达±2°,其间差错规模能够轻松到达±10°。校准经过3D线圈体系(亥姆霍兹线圈)进行,该线圈体系由在同一轴上对中的两个螺线管电磁铁组成,可抵消这些搅扰性外部磁场,以供给“清洁”的磁环境。带有惯性传感器的设备被放置在此清洁环境中,并承受丈量,以创立磁力计的原始数据记载,然后将其输入数据驱动东西,生成SIC矩阵。之后,该SIC矩阵将兼并至软件驱动器中,并永久补偿影响磁力计数据的设备内软铁歪曲。
这种办法能够在试验室条件下预算软铁效应,当然,运用过程中的改动和附加设备的影响无法得到补偿。尽管如此,这依然是一种十分有用的设备内部件校准技能,强烈建议于规划阶段在传感器制作商专家的协助下精确生成SIC矩阵并加以运用。
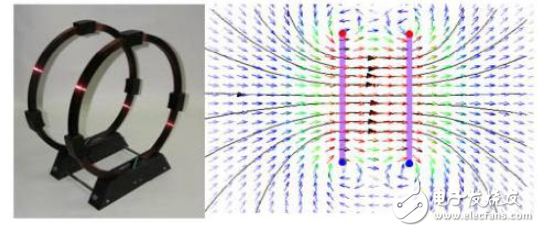
图3:3D(亥姆霍兹)线圈,用于设备内磁力计校准
惋惜的是,在一般情况下,当运用于实践PCB时,试验室校准成果无法精确作业,由于其间会生成被称为“禁区”的区域,使这些设备的精确性极度下降,致使彻底无法运用。
Bosch Sensortec的3D软铁补偿技能大大减少了这一“禁区”现象。例如,如果在间隔NFC天线仅9mm处丈量传感器数据失真,在补偿之前,最大航向差错为8°,而在补偿之后,一切海拔高度的最大差错仅为1.5°。