


近年来,世界各国的交通主管单位皆大力倡议「防护驾驭」,所谓防护驾驭是一种猜测危机并帮忙远离危机的机制,意指除了驾驭本身恪守交通规则外,也要防备其他驾驭因为本身的忽略或是成心违规,而产生交通意外。因而,防护驾驭的意图是透过目视与耳听的发觉,来认知并猜测或许产生意外之情境,而且赶快采纳必要的防护办法,以防止意外产生。
依据交通部的长时间核算与特性剖析陈述指出,全国首要交通事端原因中,以「未坚持行车安全间隔」为最多。以2014年上半年国道高速公路为例,A1类(形成人员当场或24小时内逝世)的交通事端总计三十件,而未坚持安全间隔(车前情况)占最大宗,总共有十件,并形成十一人逝世、十三人重伤。其次为改换车道不妥,总计为六件,并形成八人逝世、八人重伤。然事实上,交通部在2012年国道事端反省陈述指出,在这些形成不幸的交通事端傍边,有高达79.1%的意外是有时机事前防备的。
有鉴于此,各大车厂与驾驭人纷繁在车辆上装置各种驾驭辅佐体系,以下降闯祸率(图1)。在各种体系中,以印象为根底的辅佐驾驭体系市占率最高;其首要原因为本钱低价,且可与行车记录器结合运用,并能将侦测的成果以视觉影音的方法呈现给驾驭人,尽管其侦测间隔不及红外线与雷达,但仍广受欢迎。

图1各种不同方法之ADAS传感器
开发本钱低价印象式ADAS受喜爱
为有用下降因驾驭者不专心所导致的事端产生,车道偏移警示体系(Lane Departure Warning System, LDWS)与前方磕碰警示体系(Forward Collision Warning System, FCWS)为世界各国注重,是业界争相投入开发的两大首要先进驾驭辅佐体系(Advanced Driver Assistance System, ADAS)功用。 .LDWS
LDWS首要功用运作是透过开麦拉拍照车辆前方的场景,然后经图画处理与核算,产生车道侦测的成果;一旦车辆在没有打方向灯的景象下开端偏移车道时,体系则会主动宣布各种警示信号,提示驾驭者当即做出反响以防止意外产生。
.FCWS
FCWS的首要功用亦是透过开麦拉拍照车辆前方的场景,通过图画处理算法的核算后,将前方的车辆侦测出来,而且推估两车之间的间隔;当两车未坚持恰当的行车间隔时,体系亦主动对驾驭人宣布正告,乃至近年来已有车厂开端评价是否由行车核算机体系接收煞车功用。
上述两种ADAS的首要功用,其共同点便是拍照车辆前方的场景信息。一般来说,FCWS与LDWS都会运用同一个开麦拉所获得的印象信息,且该开麦拉亦可将印象信息储存起来,做为行车记录器之用。因而,FCWS与LDWS除了现有轿车制造商进行开发研讨之外,制造行车记录器的厂商亦活跃投入研制。
PC-based为前期惯用渠道
数字图画处理渠道首要可分为两大类,分别为软件导向的PC-based与硬件导向的独立型(Stand Alone)渠道;这两类各有其优缺点。前期,因为独立型的体系运算资源十分限制,中央处理器(CPU)指令周期较慢、内存空间缺少、可支撑的接口设备亦缺少,加上缺少有用的印象程序开发接口,导致图画处理算法的开发人员习气选用PC-based做为硬件渠道。现在,因为超大规模%&&&&&%(VLSI)与体系单芯片(SoC)的行进,数字体系的芯片有大幅行进一起缩小化的发展,使得现在嵌入式体系能够在低价位的景象下,供给高速CPU、海量存储器、更多的周边操控,乃至能够有多中心的处理器(Processor)。
独立型渠道契合轻浮矮小规划需求 如此行进下,嵌入式体系现已开端朝多媒体跨进,添加印象与视讯等二维(2D)/三维(3D)信号的运算,以扩展运用规模;再加上跟着智能化与云端化的趋势,多媒体运用与安全监控渠道,已渐由PC-based走向独立型嵌入式体系,以便满意车载运用对省电与轻浮矮小的需求。 有鉴于此,工研院便以独立型嵌入式体系方法来进行ADAS的开发与验证。 首要,算法开发人员为获得印象来开发算法,在开发初期有必要自行驾驭配有行车记录器的车辆,于路途上拍照各种不同场景、天候等行车影片,过程中还有必要统筹「正确率」与「效能」,因为对任何算法而言,杰出的正确率仅仅最基本的条件。 攸关正告提示速度ADAS算法验证至为重要
ADAS关于算法的效能必定锱铢必较,因为当风险情况产生时,体系有必要实时(Real-time)宣布正告。以FCWS为例,当某车辆于国道高速公路以时速100公里行进时,亦即其每秒行进27.7公尺;体系若推迟0.1秒宣布正告,则车辆将继续行进2.77公尺;因而规划人员习气以讯框速(Frame Per Second, FPS)来验证ADAS中的算法之效能,当FPS值越大时,代表该算法的效能越佳。
当然,算法的效能必定与嵌入式渠道的处理器速度、资源相关,所以在开发初期就有必要考虑算法的核算量是契合何种嵌入式渠道,不然将呈现算法无恰当渠道可用的窘境。
结合快速印象切割成果车道线侦测算法效能稳健
LDWS为ADAS中较早被开发的功用,车道偏移警示体系的研制,首要包括「车道线侦测」以及「车道偏移侦测」两个项目。尽管这个研讨现已有十几年的前史,一起也有许多闻名学者投入此范畴的研讨,可是其研讨成果还有许多需求改善之处;如在车道线侦测方面,因为无法猜测车道线与路途的色彩距离(梯度 (Gradient))程度。因而,算法中默许的参数便无法侦测出一切类型的车道线。此外,为强化车道线的特性,往往需求重迭多张接连的画面,以加长车道线的长度。
最终,因为运用的直线侦测算法,无法供给直线是否归于车道线或对错车道线等信息,因而传统的车道偏移体系,需求一个手动设定的画面,标示出或许的车道线区域,藉此过滤掉非车路途线。
在车道偏移侦测方面,需求剖析接连画面的改变,才干判别车子是否偏移,如此一来,体系便无法实时告诉驾驭有关车道偏移的信息。有鉴于此,工研院现已自行开宣布一种快速且健旺的车道偏移警示体系;藉由结合「快速印象切割」的成果,所开发的车道线侦测算法,能够侦测出各种类型的车道线,不需求剖析接连画面的改变,能够仅由一张画面,便判别出车辆是否偏移。
该算法的履行流程(图2)首要有五个过程。
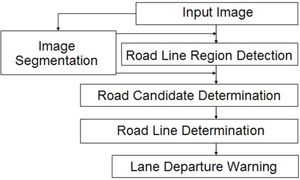
图2LDWS算法流程图
.印象切割(Image Segmentation)
首要,对原始印象进行「区域化」的过程,将印象分红若干区域。
.车道线区域侦测(Road Line Region Detection)
然后结合「印象切割后的成果」以及「梯度剖析」,以完结车道线区域侦测。
.车道线候选区域(Road Candidate Determination)
运用区域符号(Connected Component Labeling)的方法,符号每个连通区域(Connected Component),从而剖析各区域的特性,去除「非车道线区域」,以完结作业。
.车道线断定(Road Line Determination)
接着进行车道线断定过程。
.车道偏移警示(Lane Departure Warning)
最终,藉由判别左右车道线的视点,以完结警示的功用。
该算法的履行成果可参阅图4。






