


1 导言
CAN(Controller Area Network)总线是一种有用支撑分布式操控或实时操控的串行通讯局域网络,因为其高功用、高牢靠性、实时性好及其共同的规划,已广泛运用于操控体系中的各检测和履行机构之间的数据通讯,在工控范畴鼓起运用高潮。
而伺服电机具有结构紧凑、操控容易、工作安稳、呼应快等优异特性,已越来越成为现代工业自动化体系中的一个重要履行元件。在自动化程度高、需准确操控速度、方位、力矩等的场合,如印刷机械、造纸机械、纺织机械、工业机器人、高速电梯、数控机床等重要职业中,得到了遍及的运用。
德国伦茨公司出产的伺服电机因为供给了CAN总线接口,使其很容易挂接到CAN总线上,经过CAN总线进行数据传输与操控,拓宽了伺服电机的功用与运用规模,使伺服电功用更好更灵敏地运用于现代工业操控体系中。
2 CAN总线的特性
作为专门运用于工业自动化范畴的网络,CAN总线具有以下长处:
(1)运用简略便利。许多CAN操控器芯片如SJA1000T、Philips 82C250等完成了CAN物理层及数据链路层的大部分,在运用时用户需求做的仅仅两件事:对CAN操控器进行初始化,对CAN总线上的数据进行收发操作。
(2)高效牢靠。CAN选用短帧结构,数据帧中的数据字段长度最多为8B,所以传输的速度快(最大通讯速率可达1Mbps),受搅扰的概率低。一起,CAN总线作为多主节点,各节点经过总线裁定获得总线操控权,并具有完善的过错处理机制,确保了各种搅扰环境下数据传输的安全牢靠。
(3)体系可扩大性好。CAN总线是面向音讯的编码,而不是面向设备的编码,故增加或删减CAN上的节点十分便利和灵敏,易于体系的扩大。
3 伺服电机接进CAN网
伦茨伺服电机的伺服操控器因为供给了专门的CAN总线接口X4,能够象其他的CAN节点相同,用一般双绞线作为通讯介质,很便利地连接到依据CAN总线的工业操控体系上,如图1所示。
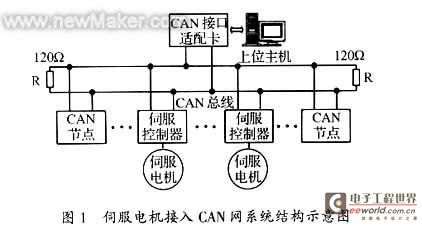
伦茨的伺服操控器与伺服电机之间选用旋转变压器或光电编码器树立反响,构成高精度的伺服操控体系,伺服电机实时地将其工作状况与工作信息上传给伺服操控器。作为CAN总线上的节点,伺服操控器不只能够与上位主机进行通讯,经过CAN总线接纳上位机的各种操作、操控和参数设定指令;一起伺服操控器之间亦能够进行快速的数据交换,相互间树立必定的和谐或操控联系。
上位主机经过接插支撑CAN的通讯适配卡获得对CAN总线的支撑,担任对整个体系的工作和作业状况进行监督管理。因为CAN总线在工业操控上的运用越来越广泛,许多公司都推出了支撑CAN总线的接口适配卡,如研华的PCL-841通讯卡、北京华控的HK-CAN20通讯卡、北京三兴达公司的智能CAN-PC总线适配卡PCCAN等等,用户能够经过这些接口适配卡,来工作杂乱的通讯使命,进行各CAN节点与上位主机之间的数字通讯和和谐管理。
4伺服操控器的功用模块与依据CAN总线的数据通道
伦茨伺服电机的伺服操控器,具有丰厚的内部功用模块库,如常见的逻辑功用模块、算术功用模块、信号类型转化模块、斜坡函数产生模块、相位积分模块以及较特别的数频输进输出模块、数频处理模块、伺服操控处理模块、速度设定处理模块等等。用户运用这些功用块,能够自在装备操控器的信号流程,使操控器能很容易地习惯不同的实践运用。
为了完成依据CAN总线的运用,伺服操控器供给了专门的CAN总线功用模块组CAN-IN与CAN-OUT,作为进程数据通道,进行进程数据的传输。其间,功用块CAN-IN1与CAN-OUT1只用于伺服操控器与上位主机之间进行通讯与数据传输。输进功用块CAN-IN1用于接纳上位主机的数据信息,CAN-IN1有8B的数据空间可供用户运用装备,能够向其他内部功用模块供给二进制信号、16位的模拟信号、16位的速度信号以及32位的相位信号等多种操控信号。上位主机经过向依据实践运用装备的CAN-IN1模块发送指令信息,能完成伺服电机的速度给定、电机快停、电机的正回转切换、电机正常形式转速与稳定低速的切换、电机使能、电机制止等各种功用。相同,CAN-OUT1功用模块亦有8B的数据空间可供用户运用,能够经过装备向上位主机实时地供给电机的各种状况信息、电机的实践速度、电机的实践相位等信息。
功用块CAN-IN2、CAN-IN3与CAN-OUT2、CAN-OUT3用于伺服操控器之间进行快速数据交换。只需装备了某一伺服操控器的CAN-OUT2或CAN-OUT3与另一伺服操控器的CAN-IN2或CAN-IN3的对应联系,即可树立起伺服操控器间的数据传输通道,在电机工作进程中将1台伺服操控器的各种数据信息传给另1台伺服操控器,常见的如:将1台伺服操控器的速度给定经必定运算处理后作为另1台伺服操控器的速度给定信号,使2台伺服电机速度份额工作。该特性关于多台伺服电机之间的和谐操控具有重要意义。上位主机亦能够监测到在CAN总线上传输的该类数据信息。
一起,伺服操控器还供给2路参数输进通道和2路参数输出通道。在CAN总线上,上位主机可经过2路参数输进通道,对伺服操控器内的各种参数进行设置修正,如伺服电机的加减速时间、齿轮箱变速比、级联系数等等;经过2路参数输出通道读取伺服操控器的各种参数,如伺服电机确当时温度、当时装备的加减速时间以及电机的实践电压电流等等,故只需是能在伺服操控器的参数代码表中找得到的参数,基本上都能够读取。
经过CAN总线接口与各个数据通道,伺服电机可将自己的相关数据信息发送到CAN总线上;一起亦能够接纳来自总线的伺服电机所需的各种数据信息与操控指令。
5 CAN的通讯协议
作为实时性要求比较高的工业操控底层网络,CAN协议只分为3层:物理层、数据链进层和运用层。CAN通讯协议有4种不同的帧格局:数据帧、长途帧、过错帧和超载帧。
因为CAN通讯协议给出的仅仅共性要求,在实践运用中需求将协议详细化,树立适用的协议规矩。依据伺服电机伺服操控器的特色,并遵从CAN通讯协议规范,拟定了伺服操控器的通讯协议规矩。伺服操控器的每个信息帧分为2部分:帧头和数据域。帧头占2B,其前11位为标识符,然后是一位RTR位,最终是4位的数据长度位DLC(即所发数据的实践长度,以字节为单位)。数据域占用8B。11位的信息标识符反响了节点的优先等级,总线裁定便是经过它来完成的,信息帧的标识符越小,信息帧就具有越高的优先权。除总线状况等特别信息外,伺服操控器对所传输信息的标识符有必定的计算公式:
信息标识符=基准标识符+设定的操控器的节点地址?
伺服操控器的节点地址能够在参数代码表中设定。而对信息的基准标识符,伺服操控器有同一的规则,如:同步触发信号的基准标识符为128,来自操控器CAN-OUT1通道的信息的基准标识符为384,而发送到操控器CAN-IN1通道的信息的基准标识符为512,经过参数通道1发送到操控器的信息基准标识符为1536,经过参数通道1接纳的信息基准标识符则为1408。
关于8B的数据域,用户需求依照所要发送的详细信息来确认应遵从的运用准则。比方,要经过参数通道进行参数设定,第1个字节为指令码,第2、3字节为参数对应的索引号,第4个字节为参数对应的次索引,后4个字节是要设定的参数数据巨细;而要发送信息到某伺服操控器的进程数据通道CAN-IN1,则直接是数据信息的发送,没有指令码,也没有索引号。
6 上位主机的软件规划
经过CAN总线进行通讯与操控的伺服电机,在针对实践的运用要求装备好伺服操控器的内部操控信号流,以及依据CAN的接口功用模块和数据通道后,剩余需求处理的是上位主机的软件规划标题。
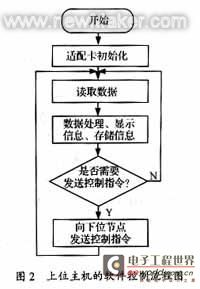
因为上位主机所接插的CAN通讯适配卡一般都供给CAN的驱动函数,所以在上位机软件的编制进程中,完成与CAN总线的通讯部分能够直接调用相应的函数,如上位主机与CAN通讯的主要使命:对CAN适配卡的初始化、CAN信息包的发送、CAN信息包的接纳等,都有现成的函数能够运用,为用户运用CAN进行通讯供给了便利。对CAN通讯适配卡的初始化主要是初始化适配卡的各个寄存器,设置中止向量、通讯卡的波特率以及中止屏蔽字等必要的参数,为正常通讯作准备。完成CAN信息包的发送,首先要确认信息包的11位信息标识符,填进帧头,并在数据域中填进需求发送的数据信息,经过发送函数发送给一切CAN节点或特定的CAN节点上。而关于运用接纳函数所接纳的CAN信息包,亦经过其11位信息标识符,断定其来历,对数据域的数据进行处理,获得有用的信息,进行显现或存储,并依照操控需求发送操控指令。其软件操控流程图,如图2所示。
上位主机正是经过对CAN驱动函数的不断调用,发送操控指令或参数设定指令给各伺服电机的伺服操控器,驱动伺服电机的启停工作;一起接纳来自伺服操控器的伺服电机的速度、相位、滚动方向、转矩等各种数据信息及状况信息,并进行剖析处理,然后依照体系的实践操控需求再给伺服操控器发送相应的指令,往驱动电机,使伺服电机的工作一直按用户的要求进行改变,然后完成对伺服电机的管理与操控。
7 结束语
伦茨伺服电机CAN接口的引入,前进了伺服电机的自动化水平,使伺服电机在工业操控网络中的通讯与操控更为便利、灵敏和牢靠。
CAN总线在现代工业操控体系中越来越广泛的运用,为带CAN接口的伺服电机供给了宽广的运用前景。
参考文献
[1]邬宽明.CAN总线原理和运用体系规划[M].北京:北京航空航天大学出版社,1996.
[2]Lenze.Operating Instruction(Global Drive Mannuls 9300).(end)






