


一、步进电机
1.1
步进电机是将电脉冲信号转变为角位移或线位移的执行机构。在非超载的情况下,电机的转速、中止的方位只取决于脉冲信号的频率和脉冲数,而不受负载改动的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性联系的存在,加上步进电机只要周期性的夺冠而无累积夺冠等特色,使得在速度、方位等操控范畴用步进电机来操控变的十分的简略。
1.2
本试验所用的步进电机为感应子式步进电机(型号为42BYG016)。感应子式步进电机与传统的反应式步进电机比较,结构上转子加有永磁体,以供给软磁资料的作业点,而定子激磁只需供给改动的磁场而不用供给磁资料作业点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其本身阻尼效果比较好,使其在工作过程中比较平稳、噪音低、低频粥少僧多小。,D=
.
1.3
相数:发生不同对极N、S磁场的激磁线圈对数。常用m一共。
拍数:完结一个磁场周期性改动所需脉冲数或导电状况用n一共,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍工作方法即AB-BC-CD-DA-AB,四相八拍工作方法即
步距角:对应一个脉冲信号,电机转子转过的角位移用θ一共。θ=360度(转子齿数J*工作拍数),以惯例二、四相,转子齿为50齿电机为例。四拍工作时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍工作时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
1.4
1)步距角精度:
2)失步:
3)失调角:
4)最大空载起动频率:
5)最大空载的工作频率:
6)工作矩频特性:
1.5
操控体系的组成方框图如下: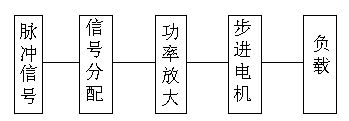
1)脉冲信号的发生
2)信号分配
感应子式不仅以二、四相电机为主,二相电机作业方法有二相四拍和二相八拍两种,,步距角为1.8度;二相八拍为
,步距角为0.9度。本规划选用步距角为1.8度。
3)功率放大
功率放大是驱动体系最为重要的部分。步进电机在必定转速下的转矩取决于它的动态均匀电流而非静态电流(而样本上的电流均为静态电流)。均匀电流越大电机力矩越大,要到达均匀电流大这就需求驱动体系尽量战胜电机的反电势。因此不同的场合采纳不同的的驱动方法,到目前为止,驱动方法一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。
步进电机一经定型,其功能取决于电机的驱动电源。步进电机转速越高,力距越大则要求电机的电流越大,驱动电源的电压越高。电压对力矩影响如下: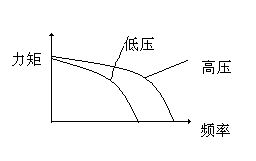
4)功率放大细分驱动器
在步进电机步距角不能分量运用的条件下,可选用细分驱动器来驱动步进电机,细分驱动器的原理是经过改动相邻(A,B)电流的巨细,以改动组成磁场的夹角来操控步进电机工作的。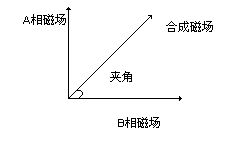
二、驱动器
咱们单片机的I/O不具有直接驱动步进电机的才能,故在本体系中需求步进电机驱动器,咱们挑选驱动器为KD-221,该驱动器具有输入电压规模广,操控信号输入方法多样等特色。其详细接法如下:
2.1、电源接线:
三、光电开关
1.
2.
3.
4.
5.






