一:前语
接着前面的终端控制台剖析,接下来剖析serial的驱动。在linux中,serial也对应着终端,一般被称为串口终端。在shell上,咱们看到的/dev/ttyS*便是串口终端所对应的设备节点。
在剖析详细的serial驱动之前。有必要先剖析uart驱动架构。uart是Universal Asynchronous Receiver and Transmitter的缩写。翻译成中文即为”通用异步收发器”。它是串口设备驱动的封装层。
二:uart驱动架构概貌
如下图所示:
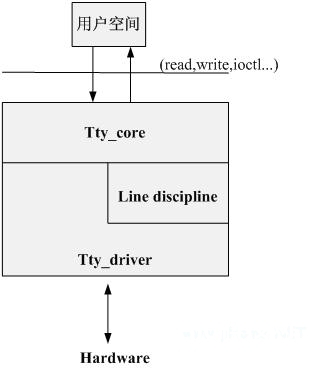
上图中赤色部份标识即为uart部份的操作。
从上图能够看到,uart设备是继tty_driver的又一层封装。实际上uart_driver便是对应tty_driver.在它的操作函数中,将操作转入uart_port.
在写操作的时分,先将数据放入一个叫做circ_buf的环形缓存区。然后uart_port从缓存区中取数据,将其写入到串口设备中。
当uart_port从serial设备接收到数据时,会将设备放入对应line discipline的缓存区中。
这样。用户在编写串口驱动的时分,只先要注册一个uart_driver.它的首要作用是界说设备节点号。然后将对设备的各项操作封装在uart_port.驱动工程师没必要关怀上层的流程,只需按硬件标准将uart_port中的接口函数完结就能够了。
三:uart驱动中重要的数据结构及其相关
咱们能够自己考虑下,根据上面的架构代码应该要怎样写。首要考虑以下几点:
1: 一个uart_driver一般会注册一段设备号。即在用户空间会看到uart_driver对应有多个设备节点。例如:
/dev/ttyS0 /dev/ttyS1
每个设备节点是对应一个详细硬件的,从上面的架构来看,每个设备文件应该对应一个uart_port.
也便是说:uart_device怎样同多个uart_port联系起来?怎样去区别操作的是哪一个设备文件?
2:每个uart_port对应一个circ_buf,所以uart_port有必要要和这个缓存区联系起来
回想tty驱动架构中。tty_driver有一个叫成员指向一个数组,即tty->ttys.每个设备文件对应设数组中的一项。而这个数组所代码的数据结构为tty_struct. 相应的tty_struct会将tty_driver和ldisc相关起来。
那在uart驱动中,是否也可用相同的方法来处理呢?
将uart驱动常用的数据结构表明如下:
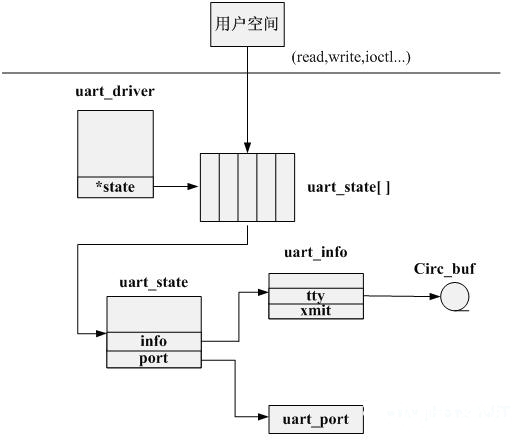
结合上面提出的疑问。能够很清楚的看懂这些结构的规划。
四:uart_driver的注册操作
Uart_driver注册对应的函数为: uart_register_driver()代码如下:
int uart_register_driver(struct uart_driver *drv)
{
struct tty_driver *normal = NULL;
int i, retval;
BUG_ON(drv->state);
/*
* Maybe we should be using a slab cache for this, especially if
* we have a large number of ports to handle.
*/
drv->state = kzalloc(sizeof(struct uart_state) * drv->nr, GFP_KERNEL);
retval = -ENOMEM;
if (!drv->state)
goto out;
normal = alloc_tty_driver(drv->nr);
if (!normal)
goto out;
drv->tty_driver = normal;
normal->owner = drv->owner;
normal->driver_name = drv->driver_name;
normal->name = drv->dev_name;
normal->major = drv->major;
normal->minor_start = drv->minor;
normal->type = TTY_DRIVER_TYPE_SERIAL;
normal->subtype = SERIAL_TYPE_NORMAL;
normal->init_termios = tty_std_termios;
normal->init_termios.c_cflag = B9600 | CS8 | CREAD | HUPCL | CLOCAL;
normal->init_termios.c_ispeed = normal->init_termios.c_ospeed = 9600;
normal->flags = TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV;
normal->driver_state = drv;
tty_set_operations(normal, uart_ops);
/*
* Initialise the UART state(s)。
*/
for (i = 0; i drv->nr; i++) {
struct uart_state *state = drv->state + i;
state->close_delay = 500; /* .5 seconds */
state->closing_wait = 30000; /* 30 seconds */
mutex_init(state->mutex);
}
retval = tty_register_driver(normal);
out:
if (retval 0) {
put_tty_driver(normal);
kfree(drv->state);
}
return retval;
}
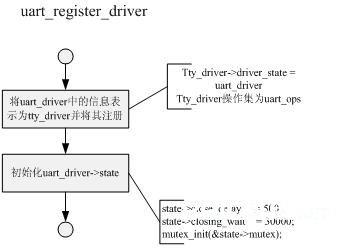
从上面代码能够看出。uart_driver中许多数据结构其实便是tty_driver中的。将数据转换为tty_driver之后,注册tty_driver.然后初始化uart_driver->state的存储空间。
这样,就会注册uart_driver->nr个设备节点。主设备号为uart_driver-> major. 开端的次设备号为uart_driver-> minor.
值得注意的是。在这里将tty_driver的操作集一致设为了uart_ops.其次,在tty_driver-> driver_state保存了这个uart_driver.这样做是为了在用户空间对设备文件的操作时,很简单转到对应的uart_driver.
别的:tty_driver的flags成员值为: TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV.里边包括有TTY_DRIVER_DYNAM%&&&&&%_DEV标志。结合之前对tty的剖析。假如包括有这个标志,是不会在初始化的时分去注册device.也便是说在/dev/下没有动态生成结点(假如是/dev下静态创建了这个结点就另当别论了^_^)。
流程图如下: