


导言
科学家们将每秒钟振荡的次数称为声响的频率,它的单位是赫兹。咱们人类耳朵能听到的声波频率为20~20000Hz。当声波的振荡频率大于20KHz或小于20Hz时,咱们便听不见了。因而,咱们把频率高于20000赫兹的声波称为“超声波”。
1.超声波测距原理
超声波是指频率高于20KHz 的机械波。为了以超声波作为检测手法,有必要发生超声波和接纳超声波,完结这种功用的设备称为超声波传感器。超声波传感器有发送器和接纳器,有的也可具有发送和接纳声波的两层作用。依据超声波的发生办法,超声波传感器可分为两大类:一类是电气式,如压电式、磁致伸缩式和电动式等;一类是机械式,如加尔统笛、液哨等。现在常用的是压电式超声波传感器。它运用压电效应的原理将电能和超声波彼此转化,即发射超声波时,将电能转化为超声波发射出去;在收到回波时,将超声振荡转化成电信号。
超声波测距的原理一般选用时刻差法,即测出超声波从发射到遇到障碍物回来所阅历的时刻,再乘以超声波的速度就得到二倍的声源与障碍物之间的间隔,即:
式中,D—传感器与障碍物之间的间隔;c—声波在介质中的传输速度。
因为超声波易于定向发射、方向性好、强度易操控、与被测物体不需直接触摸,故超声波传感器广泛地应用于液体高度丈量、轿车倒车等方面。为了进步丈量精度,减小差错,依据公式(1)可知,测距差错由传达速度差错和传达时刻差错引起。
当传达速度精确时,传达时刻差值精度只需到达微秒级,就可确保测距差错小于1mm。规划中,可选用12MHz 晶体作时钟的基准,单片机守时器的计数精度可达1us,然后确保丈量精度。
传达速度受空气密度的影响,空气密度越高,传达速度越快,而空气密度与温度有密切关系。在抱负气体中声波的传达速度c 为:
式中,γ—气体定压比热容与定容比热容之比;R—气体常数;M—气体分子量;T—绝对温度。
若温度改动不大,则可以为声速根本不变,其值为340m/s。若测距精度要求较高,为减小温度改动对声速发生的影响,在规划中,应增加温度传感器来监测环境温度,进行实时温度补偿,近似公式为:
式中,c0—零度时的声波速度332m/s; T—实践温度(℃)。
2.测距报警体系规划
2.1 硬件规划
电路原理图如图1 所示。选用PIC16F73 单片机作为主操控器,完结对CX20106 红外接纳芯片(红外常用的载波频率38KHz 与测距超声波频率40KHz 较为挨近) 和TCT40 系列超声波转化模块的操控。单片机经过端口RB1 操控超声波的发送,然后单片机不停地检测中止端口RB0/INT,当端口RB0/INT 的电平由高电平变为低电平时,体系以为超声波已回来。计数器所计数据即为超声波所阅历的时刻,经过换算可得到传感器与障碍物之间的间隔。超声信号的驱动由单片机守时器完结,LED 数字显现选用动静态驱动相结合的办法完结,报警模块选用简略的声光报警电路。
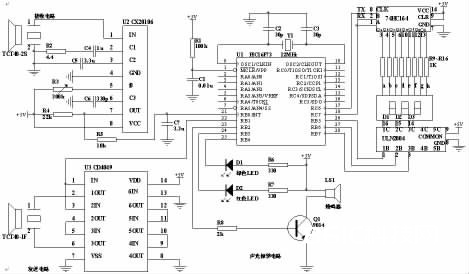
图1 测距报警体系电路原理图
体系运用单片机的守时器功用发生40KHz 脉冲信号, 并经过端口RB1 输出到超声波发射部分。超声波发射电路中, 六反相缓冲器CD4049 包含6个非门,现仅运用3 个,为避免搅扰或被静电击穿导致整个CD4049 损坏,把未运用的3 个非门串起来做接地处理。当操控端输出一系列固定频率脉冲时,在超声波发射器TCT40-1F 上就以固定的频率加正电压和反电压,然后宣布大功率的超声波。这种以软件办法发生的波形较用其他办法发生的作用更抱负。
接纳器选用与发射器相配对的TCT40-2S, 将超声波调制脉冲转化为40KHz 毫伏级电压信号, 此信号需经过扩大处理才干触发单片机中止。芯片CX20106 内置前置扩大器、限幅扩大器、带通滤波器、检波器、积分器、整型电路等。其间前置扩大器具有自动增益操控功用,可确保在超声波传感器接纳较远反射信号而输出弱小电压时,扩大器有较高的增益,而在近间隔输入信号强时,扩大器不会过载。调理芯片引脚5 的外接电阻R3 的值,可设置滤波器的中心频率。当RB3=200K时,中心频率为42KHz;当RB3=220K 时,中心频率为38KHz。当接纳到与滤波器中心频率相符的信号时,引脚7 输出一个低电平,然后触发中止。恰当改动引脚2 的外接电容C4 的值,可改动接纳电路的灵敏度和抗搅扰才能。
3位LED数码显现选用显现器动静态驱动相结合的办法完结。选用单片机串行口经过74HC164 串入并出移位寄存器来输出LED 的段驱动信号,每个LED 的段信号都连在一起,并与74HC164 输出的段驱动信号衔接。每个LED 的位驱动信号由单片机的端口RB5~RB7 经过ULN2004 驱动集成块别离驱动,LED 需用共阴数码管。
报警模块的功用是, 当传感器与障碍物的间隔不小于设定值时,绿色指示灯闪亮;反之,赤色指示灯闪亮,蜂鸣器发声,提示人员注意安全间隔。
2.2 软件规划
软件分为两部分:主程序和中止服务程序,流程图如图2 所示。主程序完结初始化作业及超声波发射和接纳操控。中止服务程序包含守时中止服务子程序和外部中止服务子程序,别离完结超声波的发射、间隔核算及显现报警等作业。
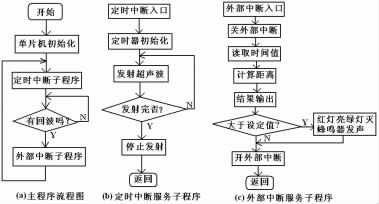
图2 测距报警体系程序流程图
3.测验成果
当间隔大于2m 时,绿灯闪亮,显现间隔;当间隔小于1m 时,红灯闪亮,由端口RB2 驱动蜂鸣器报警,显现间隔;当间隔介于2m 和1m之间时,红灯闪亮,显现间隔。为进步抗搅扰才能,体系接连发射超声波,丈量三次,从中除掉最大最小值,取中心值核算出间隔。
4.结语
此体系较好地完结了测距及报警功用,可用于轿车倒车、液位监控等场合,并且丈量简略、经济、牢靠。






