


0 导言
上世纪70 时代德国学者提出的感应电机磁场定向矢量操控技能使沟通电机变频调速技能发生了质的腾跃。它使沟通电机具有相似直流电机的调速功用,加上感应电机自身结构上的长处,然后掀起了一场沟通电气传动替代直流电气传动的浪潮。随后感应电机直接转矩操控技能(Direct Torque Control)[1][2] 自面世以来就以其明晰的物理概念,简略的操控结构和共同的磁链与转矩调理器以及杰出的动态功用招引很多的学者对其研讨。直接转矩操控技能现已成功使用在欧洲1 000多台机车与地铁车辆的变频传动体系和瑞士ABB
公司的ACS600 系列规范变频器上,实践标明选用DTC 技能能够愈加速速、灵敏的操控沟通电动机,并能够完成多样化的新操控功用。经过几十年的开展,直接转矩操控技能的详细方式呈现出多样化,有学者引进磁场定向技能、引进滑模操控技能、含糊操控技能以及神经网络操控技能等[3~6],别离针对电压空间矢量的挑选以及传统直接转矩操控技能中存在的较大转矩脉动进行研讨。文献[6]针对在传统直接转矩操控体系中,依据电机的运转状况,估算出电压空间矢量效果的占空比,然后能够改进低速时的转矩脉动。文献[7~11]等针对适用于大功率电力牵引使用场合中的一种称之为直接自操控的技能(也有称为直接定子参量操控或许直接转矩操控)进行了研讨,与传统直接转矩操控技能比较,它能够操控逆变器开关频率稳定在较低值的情况下,对转矩进行高功用的操控,并能有效地减小转矩的脉动。
1 直接自操控技能(Indirect Self Control)
1.1 ISC的技能布景
三相沟通感应电机转矩公式选用定子磁链与转子磁链能够描绘为[11]
的运算,以确认新的定子电压矢量。
假如能够选用空间矢量脉宽调制技能(SVPWM),那么就能够对定子磁链在一个PWM 周期Ts内的运动轨道进行杰出的操控:在动态过程中,能够在电压型逆变器自身输出才能的约束下,操控定子磁链矢量相角以最快的速度改变,然后加速电机转矩的响应速度;在稳态时,选用SVPWM技能操控定子磁链矢量相角并将兹sr 稳定在某一个值上,然后能够减小转矩的脉动。尤其是当感应电机运转于低速时,转矩动摇就会明显减小,因此功用有较大的进步[11]。
1.2 ISC技能的原理
从在前面的剖析中可看出,针对定子磁链幅值与电机转矩的双闭环操控的直接转矩操控体系能够转换为针对定子磁链幅值及其相角进行双闭环的操控体系,也便是针对定子磁链矢量进行闭环操控的体系,这便是直接自操控技能的起点。
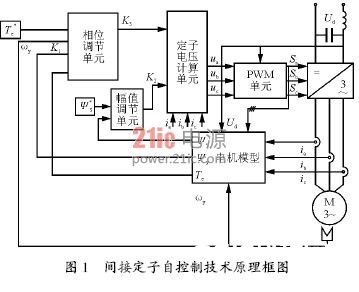
图1 给出了本文研讨的一种有用的直接定子自操控技能原理框图。图中操控体系的中心单元是定子电压矢量核算单元,它依据转矩闭环操控单元输出定子磁链矢量的相角增量K3 与定子磁链幅值调理单元输出的定子磁链幅值增量K2,以及检测到的定子电流核算出定子电压矢量的给定值。PWM单元依据定子电压矢量给定值与直流回路电压核算得到电压型逆变器的开关信号Sa、Sb、Sc。操控体系中所需求的定子磁链、转子磁链以及电机转矩是经过图中的电机观测模型核算得到的。下面针对ISC 操控体系中的要害模块进行详细剖析。
1.3 各部分模块的作业原理
1.3.1 电机转矩的闭环操控
电机转矩的闭环操控是经过对定子磁链矢量的相位调理完成的,如图2 所示。由参考文献[10]知道,电机的转矩在转子磁链同步旋转坐标系中能够表明为
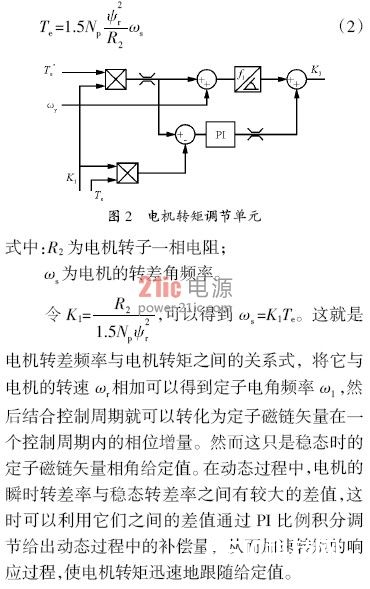
1.3.2 定子磁链幅值调理单元
在磁链幅值处于改变过程中时,就需求进行磁链幅值的调理,这时引进操控量K2。

K2表明下一时间定子磁链幅值的目标值与当时时间定子磁链幅值之间的差值。当处于稳态时K2=0,表明不需求对定子磁链的幅值进行调理。
1.3.3 定子电压矢量的核算单元
定子电压矢量核算暗示如图3 所示。
定子电压矢量核算单元是ISC操控体系的中心模块,它用来核算下一个PWM周期内应施加在电机定子端的电压矢量。图中以定子磁链矢量逆

2 感应电机直接自操控变频调速体系的仿真研讨
2.1 体系参数与运转指令的设定
下面选用闻名的仿真软件Matlab 对一台沟通异步电机进行仿真剖析,电机的额定功率是190 kW,定子一相电阻为0.024 赘,转子一相电阻为0.013 75 赘,定转子互感为8.05 mH,定子自感为8.35 mH,转子自感为8.51 mH,直流回路电压为750 V。牵引体系的速度指令在0.5 s臆t约2 s时为500 r/min,在2 s臆t约3 s 时为1 000 r/min,在3 s臆t时为100 r/min。
2.2 体系要害单元的设定
2.2.1 定子电流的限幅
与传统直接转矩操控技能相似,直接自操控技能中也没有直接对定子电流进行操控,可是能够经过以下几点来防止呈现较大的冲击电流:
1)在定子磁链的树立过程中,对定子磁链树立的速度进行约束,这样能够防止呈现较大的激磁电流;
2)在给定阶跃转矩指令的情况下,体系可能会呈现较大的转差角频率给定值然后发生冲击电流,为此需求进行限幅,这儿设置为依15 rad/s;
3)在图3中呈现的定子磁链矢量幅角增量K3,当呈现转矩阶跃指令时,也会较大,这儿限幅
为依0.8 rad。






