


导言
在智能车比赛中,速度操控不能选用单纯的PID,而要选用可以在全加快、紧急制动和闭环操控等多种形式中平稳切换的“多形式”速度操控算法,才干依据不同的路途状况敏捷精确地改动车速,完成安稳过弯。
体系硬件规划
依照比赛要求,本文规划的智能车速度操控体系,以飞思卡尔MC9S12DG128 单片机为中心,与车速检测模块、直流电机驱动模块、电源模块等一同构成了智能车速度闭环操控体系。单片机依据赛道信息选用合理的操控算法完成对车速的操控,车速检测选用装置于车模后轴上的光电编码器,直流电机驱动选用了由四个MOS管构成的H桥电路如图1所示,电源模块给单片机、光电编码器和驱动电机等供电。
体系建模
一个针对实际目标的操控体系规划,首先要做的便是对执行器及体系进行建模,并标定体系的输入和输出。为了对车速操控体系规划适宜的操控器,就要对速度体系进行定阶和归一化。对此,别离规划了加快和减速模型测定试验。经过加装在车模后轮轴上的光电编码器丈量电机转速。编码器齿轮与驱动轮的齿数比为33/76,编码器每输出一个脉冲对应智能车运动1.205mm。车模可以经过调理加给电机的PWM波的占空比进行调速。单片机上的PWM模块可以是8位或16位的,为了进步调速的精度,电机调速模块选用16位PWM,其占空比调理规模从0到65535,对应电机电枢电压从0%到100%的电池电压。
将车模放置在一段长直跑道上,选用开环办法给驱动电机加上不同的电压,记载车模在速度进入安稳后的速度值。然后将所测得的电枢电压与车速进行拟合的曲线如图2所示,由图1可将智能车加快模型近似为线性模型。
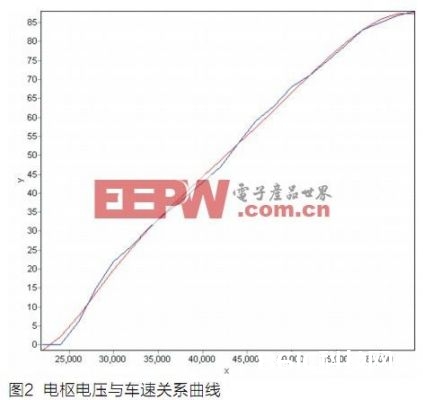
依据试验数据可以确认车速执行器体系的零点和增益。车速V与占空比PWM_Ratio的联系如下:
V = PWM_Ratio×402 + 22000 (1)
其间:PWM_Ratio的取值规模为0-65535
车模减速有三种办法:自在减速、能耗制动和反接制动。自在减速动力来自摩擦阻力,根本以为稳定。能耗制动是将能量消耗到电机内阻上,制动力跟着车速的下降而下降,也可经过操控使加快度减小得更快。反接制动经过反加电压完成,制动力与所加的反向电压有关。
因为轮胎抓地力有限,制动力超越必定值后会发生轮胎打滑的状况。一旦发生打滑,会使刹车间隔变长,过弯半径变大。假如能使刹车力一向操控在临界打滑点上,则可以获得最短的刹车间隔。在这三种减速办法中,只要反接制动可以依据不同的车速给出不同的反接刹车力,让车速以最大斜率下降。因而,经过很多试验测定出不打滑的最高刹车电压,最高不打滑划占空比约为55000。因为不同赛道会有差异,在编程时留有了余量。以震动作为辨认车模在刹车时是否打滑的标志。可以分取几个典型的车速,让车模在直道上加到预设的速度,然后别离用一组反接电压进行反接制动,调查并记载最高不打滑的刹车电压。这样,每个典型车速都得到一个对应的最大刹车电压。将最大不打滑反接电压与车速比照后,发现最大不打滑反接电压与车速成比例联系。考虑直流电机的模型,外部电压加到电机电枢上时,电机转子开端滚动,发生反电势,此电压与车速成正比例联系。当转子上发生的反电势等于外加电压后,电机速度到达稳态。因而,反接制动电压减去电机发生的反电势之后剩余的电压部分才是用于减速的。在车模要减速的时分,可以先经过当时车速计算出转子的反电势,然后在这个基础上再叠加一个反接制动电压,送到执行器上。
车模跋涉的阻力首要分为地上滑动摩擦力和风阻,车模内跋涉过程中质量坚持稳定不变。在车速较低的状况下,风阻也可以为是恒值。结合以上试验数据和推理可知,车速模型的首要部分为一阶惯性环节。
速度操控战略
经剖析,赛道大致分为直道,90度和90度以上的弯道和S形弯道等类型,要想在不同路途上发挥出最大速度,要害问题是怎么判别出路途的状况,以下是几种路途的判别条件和经过战略。
● 直道的判别条件和经过战略
当小车在中心三个光电管的检测规模内检测到黑线,则以为小车跋涉在直道上,满意直道的条件就使小车加快,直至加到某个较大的值时满意刹车的条件。假如接连几十个周期都检测到了黑线,阐明小车跋涉在长直道上,而转弯时需求刹车。
直道最高限速度是赛车从长直道入弯时不冲出弯道的最高速度,小车跋涉时不能高于这个速度。当然,刹车越及时,越活络,则直道上速度就可以越大。试验得到约为55000(对应PWM的占空比)。
需求刹车的最小速度是让小车从长直道入弯,不必刹车时可以顺畅经过弯道的最高速度。当车的瞬时速度高于这个速度入弯时,发动刹车,反之,不必刹车。试验测得长直道入弯最高速度不超越50000(对应PWM的占空比)。
● 弯道判别条件和经过战略
当小车不满意直道的条件时,则跋涉在弯道上。因为弯道的曲率半径和视点的不同分为90度和90度以上的弯道和S形弯道。当小车跋涉在弯道时,只要某一边的传感器接连检测到黑线,再依据两头的传感器检测到黑线时刻的长短来确认弯道视点的巨细;假如小车跋涉在S形弯道上,则传感器检测到的值会在水平误差规模内接连改变。总之在弯道上,要以弯道最大速度跋涉。
弯道最大速度是让小车在弯道上一向加快,直至冲出赛道的速度。当赛车在弯道上的速度小于弯道最大速度时,就要调整PWM信号的占空比,使小车逐步加快。试验测得一切弯道最大速度不超越32000(对应PWM的占空比)。
● 穿插线辨认
按比赛规则,还有穿插线,但因为是直角穿插,因而只需求在多个传感器都检测到黑线的状况下坚持本来的跋涉方向和速度继续跋涉即可。






