


导言
现在,CAN(controller ai\’ca net)总线技能与PID技能作为一种老练的技能被广泛的应用于工业、纺织、轿车等范畴。CAN总线技能又称操控器局域网技能,是一种多主办法的串行通讯总线技能,具有灵敏便利、通讯速率高、抗搅扰能力强、可靠性高级长处,而被广泛应用于工业远距离数据收集与操控进程中。
PID技能作为一种现在广泛应用的老练技能,具有稳定性高、使用便利等长处,被广泛应用于流量、温度、液位操控等范畴。但因为PID操控在遭到外界搅扰时,很简单导致超调过大乃至引起震动等缺陷,然后使得该体系的动态性能及鲁棒性变差。
本文经过结合CAN总线技能与含糊PID操控技能很好的处理了纺织机在送经进程中对经线张力的操控。经过CAN总线技能完成SH7047高速单片机与伺服驱动器来操控电机转矩的意图,经过simulink的在线仿真证明了该体系具有很好的稳定性、鲁棒性及可靠性等长处。
1 CAN总线体系操控原理
本文充分考虑体系的抗搅扰性、可靠性及对现场设备的远距离数据收集和操控通讯等特色。设置了以SH7047高速单片机为主控芯片,完成上位机HMI及私服驱动器的操控。经过上位机友爱的人机界面完成对整个织机运动进程的参数设置,例如(纬密度、张力值、编码器的脉冲值等),如图l所示,CAN总线高速高级织机电控体系框图。

图1 CAN总线高速高级织机电控体系框图
2 含糊PID操控器的原理及完成
2.1 含糊PID操控器的原理
含糊PID操控是在传统PID操控的基础上对PID参数(K。K。KD)在线整定。经过输入量的含糊化、含糊规矩运算、反含糊化来完成对PID参数的整定。如图2所示。
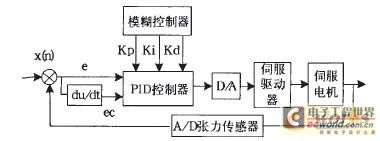
图2含糊PID体系框图
在实践体系中,动态送经张力操控是指织机运行时的张力操控。因为卷取的输入值近似为一个常数,而在实践中,因为微分项关于快变信号很灵敏,而纱线的张力改变是一个周期性的改变进程,在打纬的前后改变很大。这样关于操控提出了很高的要求。在实践中咱们能够考虑选用含糊PID操控的办法。含糊PID操控是依据含糊操控的基础上经过依据不同的E和EC,关于K KI KD参数进行在线自整定,其结构由惯例操控器及含糊推理两部分组成。






