


动感体系是新式车辆模仿驾驭练习系统的重要组成部分,它能够增强模仿驾驭练习的实在感,这是新式车辆模仿驾驭练习系统差异于现有车辆模仿驾驭练习系统的共同之处。详细介绍动感体系的整体设想及其软硬件规划。
1 导言
车辆模仿驾驭练习体系是一种运用现代技能手段模仿真车驾驭的仿真体系,它能够使轿车驾驭练习愈加安全、经济、高效和传神。与现有车辆模仿驾驭练习体系比较,新式车辆模仿驾驭练习体系的共同之处是增加了动感体系。该动感体系能够使驾驭员在模仿驾驭室内实在感受到模型车所行进的沙盘路面的情况,与实车在正常路面上行进的感觉相同,然后补偿现有车辆模仿驾驭练习体系的缺乏,进步驾驭练习的作用。
2 体系的组成及作业原理
新式车辆模仿驾驭练习体系中的动感体系主要由动感数据收集体系、动感数据无线发收体系、动感渠道及其操控体系组成。
作业原理是:装置于模型车上的动感数据收集体系实时收集模型车行进过程中姿势的动感数据,经过无线收发体系将动感数据实时传送到动感渠道操控体系,从而使动感渠道发生相应的动感。
3 硬件规划
3.1 动感数据收集体系
动感体系的动感数据收集运用HMR3000型数字罗盘模块。HMR3000是Honeywell公司的产品,它不仅能够丈量磁场,还能够丈量物体的姿势,实时精确地输出被测物体的俯仰角、横滚角和航向角。用单片机和HMR3000组合构建适用于机载或车载的测控体系,可广泛运用于帆海、通讯雷达、微波定向、海上渠道操控、天线装置、无人机、机器人、运动定向、主动操控等方面。
HMR3000体积小、功耗低、精度高、价格便宜,是姿势丈量用户的抱负挑选。
3.1.1 HMR3000的数据输出格局
HMR3000数字罗盘依照NMEA0183的格局,经过所带的RS-232接口输出数据。输出6种格局:HDG格局、HDT格局、XDR格局、HPR格局、RCD格局和CCD格局。动感体系选用的是如下所示的HPR格局:$PTNTHPR,x..x(航向),a,x..x(俯仰角),a,x..x(横滚角),a*hh该数据输出格局将HMR3000的3个重要丈量成果和相应的丈量状况结合在一起。数据中的x..x为所测的相应航向角、俯仰角和横滚角的值,方式为n位ASCⅡ码,单位能够是“度”也能够是“mils”。数据中的“a”表明丈量状况。丈量状况有以下6种:
L=LOW ALARM(初级报警);
M=LOW WARNING(初级正告);
N=NORMAL(正常);
O=HIGH WARNING(高档正告);
P=HIGH ALARM(高档报警);
C=TUNING ANALOG CIRCUIT(调理模仿电路)。
假如1个输出句子的3个状况指示中有任何1个报警,航向方位将为空白。报警和正告的阈值能够在EEPROM中更改。
3.1.2 HMR3000的操控指令
作业:罗盘发动,指令为#FAO.3=1*26<CR><1f>;
中止:罗盘中止,指令为#FAO.3=0*27<CR><1f>;
问询:问询罗盘发动、中止状况,指令为#FA0.3?*15<CR><lf>;
呼应:有二种呼应,作业状况呼应为#1*31<CR><lf>;中止状况呼应为#0*30<CR><1f>。
3.1.3 HMR3000的数据单位和进制的设定指令
数据单位能够分为“度”和“mils”二种。度=mils×9/160,其间,度的数值是0.0″359.9,而mils的数值是0″6 399。进制分为十进制和十六进制二种。设定数据单位和进制的指令如下:
#FA0.4=1*21<CR><lf> ∥殳定罗盘数据单位为“度”
#FA0.4=0*20<CR><lf> ∥设定罗盘数据单位为“mils”
#FA0.5=1*20<CR><lf> ∥设定罗盘数据为十进制
#FA0.5=0*21<CR><lf> ∥设定罗盘数据为十六进制
3.1.4 HMR3000数据收集速率的设定指令
HMR3000的数据输出有6种格局,对应的数据收集速率格局也有6种,其间HPR格局更新速率指令为
#BAD=I*hh<CR><lf> ∥设定HPR的更新速率为“I”句/s
其间I的值能够设为0、l、2、3、6、12、20、30、60、120、180、300、413、600、825、1200。
3.1.5 HMR3000姿势数据的查询指令
HMR3000发动后会依照指定的作业形式发送数据,一般会挑选接连作业方式。需求查询当时的数据状况和详细数值时需求运用查询指令。HPR格局的查询指令为
$PTNT,HPR*78<CR><lf> ∥查询HPR格局的数据状况
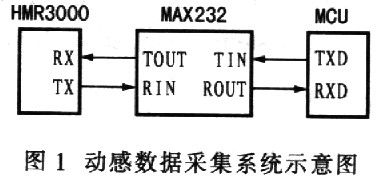
3.1.6 HMR3000与MCU的接口衔接
因为HMR3000与外界的串行通讯选用的是本身所带的RS-232接口,与MCU串行数据传输的TTL电平不匹配,所以需求MAX232型电平转换器,如图1所示。
3.2 动感数据无线收发体系
动感数据无线收发体系选用nRF905型无线收发模块,该模块具有以下杰出特色:
●三频段收发合一,作业频率为世界通用的ISM频段433/868/915 MHz;
●GMSK调制,抗干扰能力强,特别合适工业操控范畴;
●选用DSS+PLL频率组成技能,频率稳定性极好;
●灵敏度高,到达-100 dBm;
●作业电压低(2.7 V),功耗小,待机状况仅为1 μA,可满意低功耗设备的要求;
●最大发射功率达+10 dBm;
●具有多个频道(最多170个以上),能满意需求多信道作业的特别运用;
●作业速率最高可达76.8 kb/s;
●外围元件数目少(仅10个),基本上无需调试;
●因为选用低发射功率、高接纳灵敏度的规划,运用无需请求许可证,运用间隔最远可达l 000 m。
此外,因为nRF905是一款收发一体化的无线传输电路,带有调制器和解调器,发送时能够主动打包,接纳时能够主动进行地址匹配、主动CRC查验,发送或接纳结束后,其DR引脚会主动设置高电平,以示发送或接纳结束,而且选用SPI接口与MCU通讯,因此编程十分便利。它可广泛运用于车辆监控、遥控、遥测、工业数据收集、水文气象监控、非触摸RF智能卡、机器人操控、数字音频和数字图像无线传输等范畴。
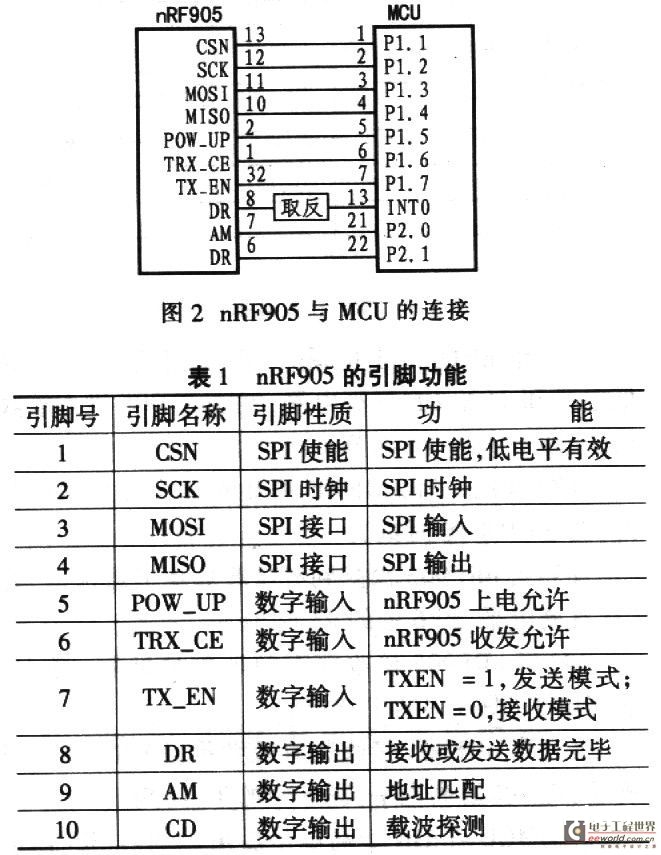
nRF905除了担任动感体系中动感数据的无线传输外,还可传输新式车辆模仿驾驭练习体系中模仿驾驭室向模型车发送的油门、灯火、制动、转向、分动箱、聚散等操控指令。nRF905与MCU的衔接如图2所示,引脚功用阐明见表1。
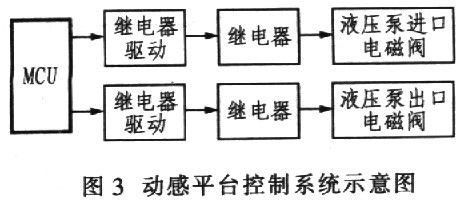
3.3 动感渠道及其操控体系
动感渠道是动感体系的履行部分,它由6个液压泵和模仿驾驭室的底板构成。其作业原理是MCU依据传来的动感数据经过继电器驱动电路操控相应继电器,使相应液压泵的相应电磁阀敞开或闭合,从而模仿驾驭室上下波动、前后俯仰或左右摇摆,如图3所示。
4 软件规划
因为HMR3000和nRF905别离经过RS-232接口和SPI接口与MCU进行通讯,故整个体系的硬件电路相对比较简单,可是,因为HMR3000选用NMEA0183协议格局输出数据,nRF905收发数据又有严厉的时序要求,因此软件规划相对比较复杂。






