


1导言
跟着计算机技能和网络技能的开展,各种新式的操控办法运用于机器人操控。分布式操控体系是在计算机监督操控体系、直接数字操控体系和计算机多级操控体系的基础上开展起来的,是生产进程的一种比较完善的操控与办理体系。与计算机多级操控体系比较,分布式操控体系在结构上愈加灵敏、布局更为合理和本钱更低。分布式操控结构成为机器人操控体系开展的方向。文[2]中作者规划了一种依据CAN总线的分布式的仿人机器人的操控体系。
为此,咱们研发了新式的小型仿人机器人操控体系。本试验室研发的小型仿人机器人各关节选用舵机操控,依据要求,本规划需求完结小型仿人机器人腿部的运动操控,到达小型化,低功耗。
2小型仿人文娱机器人分布式操控体系
2.1整体计划规划
本文研讨的小型仿人文娱机器人运动操控体系由主操控器ARM9,C8051F320单片机与4片CD4017外部计数器构成的操控单元组成,操控结构简略灵敏。USB通讯计划满意了主从操控和通讯速度的需求。关节执行组织选用舵机,操控办法简略有用。整体操控办法简图见图1。
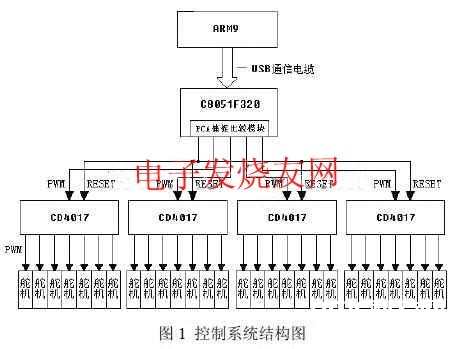
主操控器端,选用ARM9(S3C2410)作为办理操控器担任和谐操控,向单片机发送规划好的运动操控数据并扩展语音,视频等。S3C2410主操控器有一个USB host,衔接C8051F320单片机。
单片机端,运用C8051F320中的PCA捕捉比较模块发生PWM操控信号。当单片机经过USB总线接纳到由ARM办理操控器发来的数据包时,依据设定的对应联系将数据包中16位操控数据转化为PCA比较值,由PCA模块发生相应占空比的PWM操控信号,别离输出给4片CD4017外部计数器。一起PCA模块还守时发生一路复位脉冲,一起发送给4片CD4017,保证CD4017多路PWM输出与单片机接纳到多舵机操控数据对应联系正确。C8051F320操控器电路板如图2。

CD4017外部计数器将CP引角输入的PWM转化为多路PWM,别离操控与之相连的各舵机滚动,完结各杆件方位的开环操控。CD4017引脚功用及摆放如图3。
2.2 USB通讯的完结
在计算机和单片机的操控数据传输领域内,长期以来广泛的运用RS-232,RS-485等通讯办法,这些通讯办法讯的实时性较差, 毛病率较高, 呈现毛病时, 不简单排查[3]。不可以满意小型仿人机器人的实时性和大批量数据传输的要求。USB总线通讯办法作为新一代计算机外设的接口技能,跟着USB技能的日益老练,及共同的长处(对多种设备的广泛适用性,主动装备,简单扩大,易于衔接,热插拔,即插即用、高可靠性,低本钱,低功耗等),运用远景十分广泛[4]。
本操控体系中的办理操控器ARM9(S3C2410)集成了一个USB host,选用Linux操作体系;C8051F320器材集成了全速/低速USB功用操控器,用于完结USB接口的外部设备,均支撑USB2.0通讯协议。单片机端规划了通讯固件程序和运用程序,用于接纳USB通讯内容。
2.3依据C8051单片机和CD4017外部计数器的关节操控器规划
选用一片单片机与4片CD4017外部计数器的关节操控器规划计划,极大极限的精简了硬件数量,节省了空间,下降了软硬件犯错的可能性,也为体系运动功用的扩展供给了满足空间和灵敏性(自在度数量设置可在36个以内恣意增减)。
依据C8051的规划中有许多办法用于发生PWM波形:软件循环、查询或中止驱动的守时器等。运用可编程计数器阵列PCA发生PWM相对于任何查询机制(依据软件或守时器而言)可以大大下降所需求的CPU带宽,并可以消除在中止驱动的依据守时器的规划中因中止推迟不一致而发生的时序颤动。PCA由一个专用的16位计数器/守时器和5个16位捕捉/比较模块组成。每个捕捉/比较模块有其自己的I/O线。计数器/守时器由一个可编程的时基信号驱动。计数器/守时器有一个16位的计数器/守时器寄存器、一个用于挑选时刻基准的办法寄存器和一个包括计数器/守时器运转操控及各模块捕捉/比较标志的操控寄存器。每个捕捉/比较模块有一个用于挑选模块作业办法的装备寄存器和一个16位的捕捉/比较寄存器。每个捕捉/ 比较模块的作业办法都可以被独立装备。因为一切的捕捉/比较模块同享一个时刻基准,因而它们同步作业[5][6]。本文研讨的小型文娱机器人关节操控器规划中,将PCA装备为独立作业;每个模块的中止服务程序只影响该模块的捕捉/比较寄存器。PCA办法寄存器和装备寄存器设置一次后不再改动,让计数器/守时器寄存器自在运转。
在高速输出办法,每逢PCA计数器与模块的16位捕捉/比较寄存器发生匹配时,模块I/O线的引脚上的逻辑电平将发生凹凸转化,并可以挑选发生中止。本运用程序中挑选了该中止。
CD4017基本功用是对CP端输入脉冲的个数进行十进制计数,并依照输入脉冲的个数次序将脉冲分配在Y0~Y9这10个输出端,计满10个数后计数器复零,一起CO端输出一个进位脉冲。当CR端有正脉冲输入时,该脉冲的上升沿将触发CD4017复位,此刻Y1~Y9输出均变为低电平,只要Y0脚输出变为高电平,故可以运用CR的正脉冲输入中止计数[7]。
本文研讨的小型文娱仿人机器人操控体系计划中,一个CD4017输出7路脉冲,别离发送给7个舵机。
3 试验
操控体系硬件什物衔接图如图4。

机器人步行试验完结5步的向前行和5步的撤退的行走进程。步行试验进程如图5。
4 定论
依据小型仿人机器人的组织特色和功能要求,构建了以ARM9为主操控器的小型仿人机器人操控体系。规划开发了C8051USB单片机和CD4017外部计数器组成关节操控器,该关节操控器可以完结多舵机的和谐操控使命。实践证明,选用该结构之后,整个机器人体系的模块化程度更高,体系的安装和调试愈加便利。操控体系完结了小型化、低功耗,并且机器人行走稳定性。






