


摘要:针对固定式太阳能使用设备的光能使用率低,规划一种太阳追寻体系。此体系由单片机智能操控,选用光电传感器检测太阳照射下遮光器的暗影,然后准确认位太阳与太阳能使用设备相对方位,完成太阳能使用设备的全程太阳追寻,使太阳光能最大极限地得到使用。
跟着经济发展和社会进步,自然资源被大量地、乃至是掠取性地开发和使用,人类的自然资源行将干涸,因而,寻觅新动力已火烧眉毛。而太阳能作为一种洁净环保而且取之不尽的可再生新动力在人类出产日子中具有广泛效果。所以,合理开发使用太阳能,进步太阳能使用率有着极其重要的含义。现在,太阳能使用设备的放置方位大多是固定不变的,而一天傍边太阳与太阳能使用设备的相对方位是时间改变的,这也就无法确保太阳能使用设备时间遭到阳光直射,然后使太阳光能的使用率大大下降。为了进步太阳能的使用率,规划一种太阳追寻体系,使太阳能使用设备时间承受阳光直射,最大极限的使用太阳光能。
1 整体方案的规划
太阳追寻体系由操控模块、检测模块、履行模块3部分组成。其间,操控模块首要包含STC89C52单片机组成的中央处理器;检测模块首要由遮光器合作下的光电传感器、方位传感器及其外围电路构成;履行模块首要包含步进电机、驱动电路。其整体结构如图1所示,其样机如图2所示。

阳光照射下的物领会发生暗影,暗影的方向与太阳光线的方向共同。依据这一原理,本体系选用光电传感器检测太阳照射下遮光器的暗影,准确认位太阳与太阳能使用设备相对方位。
太阳在一天中的运动轨道可以分解为水平方向和俯仰方向。如图3所示,在水平方向上,当太阳光线直射太阳能使用设备时,水平遮光器3的暗影彻底遮住水平光电传感器4;在俯仰方向上,当太阳光线直射太阳能使用设备时,俯仰遮光器5的暗影彻底遮住俯仰光电传感器6。当两个光电传感器一起彻底处在暗影下时,太阳能使用设备处在阳光直射状况下。
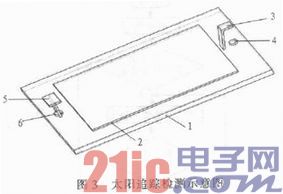
如图3所示,当水平遮光器3的暗影没有彻底遮住水平光电传感器4时,阐明太阳能使用设备2在水平方向上没有到达太阳直射,操控模块接纳到此刻水平光电传感器4传递的信号后会操控履行模块水平方向上的电机滚动,直到水平遮光器3的暗影彻底遮住水平光电传感器4,水平方向上的电机才中止滚动,使太阳能使用设备在水平方向上到达太阳直射;当俯仰遮光器5的暗影没有彻底遮住俯仰光电传感器6时,阐明太阳能使用设备2在俯仰方向上没有到达太阳直射,操控模块接纳到此刻俯仰光电传感器6传递的信号后会操控履行模块俯仰方向上的电机滚动,直到俯仰遮光器5的暗影彻底遮住俯仰光电传感器6,俯仰方向上的电机才中止滚动,使太阳能使用设备在俯仰方向上到达太阳直射;当水平遮光器3的暗影彻底遮住水平光电传感器4、俯仰遮光器5的暗影彻底遮住俯仰光电传感器6时,太阳能使用设备此刻到达太阳直射。
阴地利太阳光线暗,可是遮光器在太阳照射下发生的暗影与太阳光线之间依然存在着显着比照,故本体系可以持续准确认位太阳方位,然后使太阳追寻体系不受气候改变的影响;当太阳光线暗到不适合太阳能使用设备作业时,检测光照强度的光电传感器将信号传递给操控模块,操控模块会使太阳追寻体系中止作业,下降太阳追寻体系的动力损耗。
水平方向上太阳追寻体系的运动轨道:从早晨到晚上,太阳的运动轨道是自东向西,履行模块的初始设定轨道也是自东向西,初始设定方位是朝向东方的。晚上,履行模块是朝向西方的,第二天早晨,朝向西方的履行模块会持续自东向西滚动必定视点牵动水平方位传感器,操控模块接遭到水平方位传感器的信号后会使履行模块在水平方向上复位,然后使履行模块一向追寻太阳自东向西滚动。俯仰方向上太阳追寻体系的运动轨道:从早晨到正午,太阳的运动轨道是自低到高,从正午到晚上,太阳的运动轨道是自高到低。从早晨到正午,履行模块跟从太阳自低到高滚动;从正午到晚上,履行模块首先会持续自低到高滚动必定视点牵动榜首俯仰方位传感器,操控模块接遭到榜首俯仰方位传感器的信号后会使履行模块跟从太阳自高到低运动;第二天早晨,履行模块首先会持续自高到低滚动必定视点牵动第二俯仰方位传感器,操控模块接遭到第二俯仰方位传感器的信号后会使履行模块跟从太阳自低到高运动。
2 太阳追寻体系的硬件规划
2.1 履行模块规划
为了使履行模块带动太阳能使用设备全程追寻太阳,履行模块有必要可以在水平缓俯仰两个方向滚动,以满意太阳水平方向:东-西,俯仰方向:低-高-低的运动特色。因而,履行模块装有两个步进电机,经过两个步进电机的合作滚动完成履行模块在水平跟俯仰方向上的运动,然后完成全程追寻太阳。
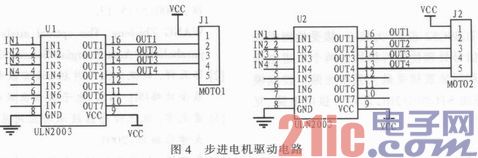
两步进电机由两个ULN2003芯片驱动,两驱动芯片与操控模块中单片机的P0口相连接。其间,P0.0—P0.3操控水平方向上的步进电机,P0.4-P0.8操控俯仰方向上的步进电机,在单片机的操控信号下完成滚动或中止。两步进电机的驱动电路如图4所示。
2.2 检测模块规划
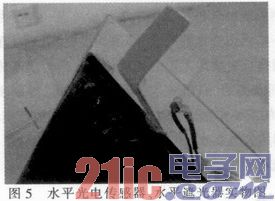
水平光电传感器及其相合作的水平遮光器结构什物如图5所示。用水平光电传感器检测水平遮光器发生的暗影来确认太阳能使用设备与太阳的水平相对方位。
俯仰光电传感器及其相合作的俯仰遮光器结构什物如图6所示。用俯仰光电传感器检测俯仰遮光器发生的暗影来确认太阳能使用设备与太阳的俯仰相对方位。
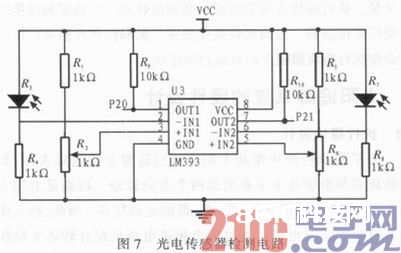
遮光器合作下光电传感器检测电路首要由光电传感器、电阻、电位器以及LM393芯片组成。当光电传感器承受的光照强度大于设定值时,LM393芯片-IN管脚电位低于+IN管脚电位,此刻,LM393芯片OUT管脚输出高电平;当光电传感器承受的光照强度小于设定值时,LM393芯片-IN管脚电位高于+IN管脚电位,此刻,LM393芯片OUT管脚输出低电平。LM393芯片-INT管脚和+IN管脚别离与单片机的P2.0和P2.1口相连。两光电传感器的检测电路如图7所示。
依据太阳的运动轨道,履行模块在水平方向上的滚动视点为180度,履行模块水平方向上装有两个方位传感器,用来限制履行模块的水平运动规模;履行模块在俯仰方向上的滚动视点为90度,履行模块俯仰方向上也装有两个限位传感器,用来限制履行模块的的俯仰运动规模。
2.3 操控模块规划
操控模块以一片STC89C52芯片为中心,承受检测模块传递的信号后,经过对信号处理使履行模块的两个步进电机动作,然后确保太阳能使用设备承受最大强度光照。操控模块中使用的单片机体系由STC89C52RC芯片、供电电路、复位电路、晶振电路四部分组成。
3 体系软件的规划
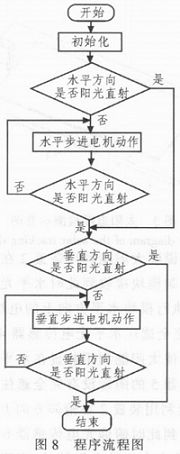
该操控体系的软件首要由一个主程序及一些子程序组成。主程序由一些状况挑选句子、循环句子组成,首要是在体系复位后从头检测履行模块与太阳的相对方位。当传感器传回相应的光照、方位等信息后,STC89C52呼应相应信号,操控步进电机滚动。子程序的首要效果是经过电机正回转操控履行模块的动作,使太阳能使用设备在水平与俯仰方向上组合运动。
程序流程图如图8所示。
4 结束语
太阳追寻体系立异之处在于模仿向日葵,遵从太阳运动规则,选用选用光电传感器检测太阳照射下遮光器的暗影准确认位太阳与太阳能使用设备相对方位,经过单片机智能操控,完成太阳能使用设备的全程太阳追寻。本体系的首要功能是进步太阳光能的使用率,以缓解当时动力严重的现状。将其使用在太阳能发电站、太阳能路灯、太阳能热水器、太阳灶以及一切固定式太阳能电池板等处,可以大大进步这些设备的使用率。跟着人们节能环保认识的不断进步,它将被使用到更广泛的场合。






