


在不需要接连观测的运用中,均匀功耗与噪声的联系变得更有意义。或许令人难以置信,但噪声和功耗的联系乃至或许变成互补式。这对工程师来说无疑是个好消息。由于在之前的规划中,工程师或许因难以确定该让功耗仍是功用主导其规划而延误了机遇。而现在,无需等候其他人在这一权衡中做出决议,智能传感器架构师可自行对权衡范围内的相关选项进行量化;这一做法将从头界说架构师的作业。
组成智能传感器架构的5个部分,你都造吗?图1是智能传感器架构的一般比如,其间包含了最常见的功用。
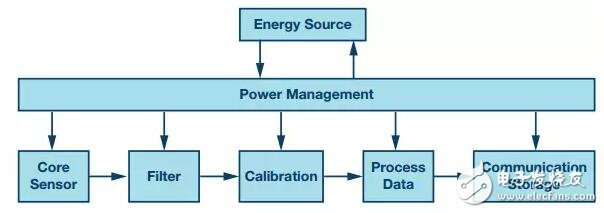
中心传感器
智能传感器节点中的信号链从中心传感器功用开端。最基本方式的中心传感器也称为变换器,其将物理条件或特点转化成代表性的电信号。传感器的份额因子描绘其电呼应与其监控的物理特点或条件的线性联系。
滤波器
滤波器的作用是下降中心传感器或许支撑,但与运用无关的频段中的噪声。在振荡监控运用中,这或许是一个带通滤波器,它将随机振荡与或许指示机器寿数减损的特定频谱特征别离开来。在歪斜传感器中,这或许是一个简略的低通滤波器,例如移动均匀滤波器。这种情况下,时长是树立时刻与滤波器输出剩余噪声之间的一个重要权衡要素。图2显现了ADXL355艾伦方差曲线的比如,它表明相关于发生丈量的均值时刻,丈量的不确定性(噪声)。
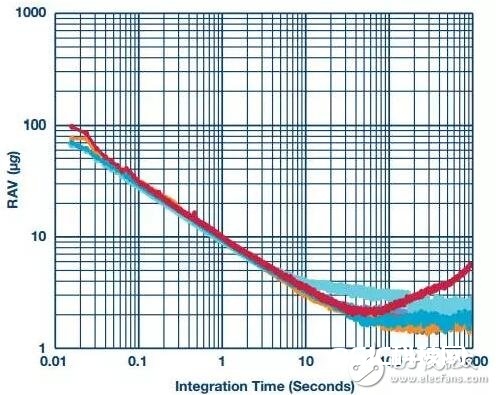
图2. 艾伦方差曲线:ADXL355和ADXL362
校准
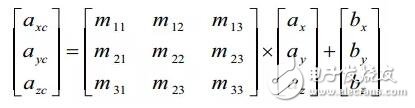
校准功用的作用是经过运用校对公式来进步丈量精度。在要求极高的运用中,通常是在严厉受控条件下进行丈量,经过直接观测传感器呼应来取得此类校对公式。例如在歪斜传感器运用中,校准进程涉及到观测MEMS加速度计在多个不同方向上相关于重力的输出。这种观测的一般方针是观测传感器对足够多取向的呼应,然后求解如下联系式(拜见方程1)中所有12个校对系数(m11、m12、m13、m21、m22、m23、m31、m32、m33、bx、by、bz):
数据处理
数据处理功用用于将校准且滤波的传感器数据转化成恰当的丈量成果以对运用供给最佳支撑。在振荡监控体系中,这或许是简略的RMS-DC转化或带频谱报警的快速傅里叶变换(FFT)。在歪斜检测运用中,智能传感器会运用如下将传感器对重力的加速度呼应转化成方位角估量值。
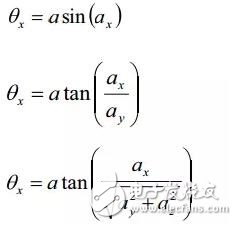
这三个联系式别离代表运用一个、两个和三个加速度计丈量成果的歪斜估量,假定各加速度计彻底正交。






