


0 引 言
旋转变压器/数字转化器是角位移丈量和操控的重要组件,它把测角模拟量转化成数字量信号,广泛使用于飞行器姿势操控和检测、导弹操控、雷达天线监控、火控体系等军事装备中。跟着集成电路的高速开展,这种类型的转化器已有许多产品以固态电路封装方法应市。在国内这种数字转化器模块有12位到22位不等,转化精度根本可以满意使用需求,但因为数字转化器内部响应速度的约束,转化器只能盯梢必定速度规模内的轴角改变,在要求多路信号切换速度较高的数字转化体系中,用一个数字转化器模块操控多路信号的数字量输出时,将不可避免地呈现数字量输出滞后于轴角的改变。为了精确地获取视点信号,就需要添加多路测角的时刻周期,为此介绍一种依据ISA总线的三路旋转变压器/数字转化模块接口电路,该电路现已成功使用在某渠道惯导三个姿势角的丈量中,测角速度快,精度高。
1 旋转变压器/数字转化模块作业原理
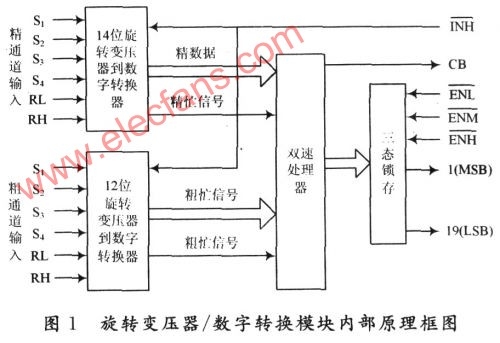
旋转变压器/数字转化模块是电路的重要元器件,依据需求选用中船重工集团第716所出产的型号为19XSZ2413一S32的19位旋转变压器/数字转化模块,其测角精度能到达10”。依据旋转变压器/数字转化模块的根本原理出产出的旋转变压器/数字转化模块,其内部包含粗通道旋转变压器到数字转化器、精通道旋转变压器到数字转化器、双速处理器和三态锁存器。粗通道旋转变压器到数字转化器转化成12位数字视点,精通道旋转变压器到数字转化器转化成14位数字视点,两数字视点量再经一个双速处理器进行硬件实时纠错处理、粗精组合后,输出一个19位并行数字视点量到锁存器。该模块内部原理框图如图1所示。
2 硬件规划及剖析
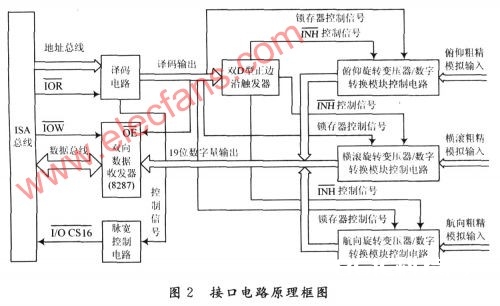
整个接口电路首要由3部分构成:译码电路、旋转变压器/数字转化模块操控电路和脉宽操控电路,接口电路原理框图如图2所示。
2.1 译码电路
译码电路首要由译码芯片SN74HC154组成,用来发生接口电路的端口地址。当ISA总线的地址线SA15~SA10,SA4和SA0为逻辑“O”,SA9~SA7和SA5为逻辑“1”,SA1,SA2,SA3,SA6别离对应SN74HCl54的输入端A,B,C,D时,选通接口电路,由此知该接口电路的地址规模为:0x03AO~Ox03AE和0x03EO~0x03EA,其间,0x03EO~Ox03EA别离为读俯仰、横滚、航向的低16位和高3位数字信号,0x03A0和Ox03A8别离为三路一起免除和制止INH信号,Ox03A2~0x03A6别离为免除俯仰、横滚、航向的INH信号,0x03AA~Ox03E别离为制止俯仰、横滚、航向的INH信号。
2.2 旋转变压器/数字转化模块操控电路
三路旋转变压器/数字转化模块操控电路是整个接口电路的中心,由3个旋转变压器/数字转化模块及其外围操控电路组成。旋转变压器/数字转化模块中的两个重要信号“INH”和“CB”别离操控输入模拟信号的转化和输出19位数字信号的锁存。INH制止信号输入端,内部现已用上拉电阻接到+5 V,当INH为逻辑“0”,即制止INH信号时,推迟600 ns后锁存器内数据安稳,可读取数据;当INH为逻辑“1”,即免除INH信号时,锁存器内数据更新,此刻制止读取数据。CB为数据转化完毕的检测信号,当CB为高电平时,表明转化器内处于盯梢转化状况,此刻数据输出不安稳;当CB为低电平时,表明转化器内现已转化完毕,此刻数据输出安稳有用,可以读取。其间一路旋转变压器/数字转化模块操控电路原理框图如图3所示。
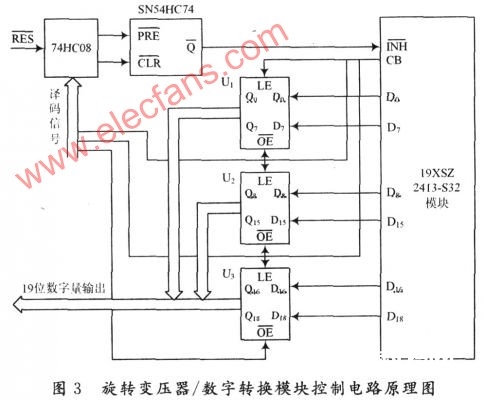
该电路在工控机刚开始上电时,“RES”(RESET DRV)输出一负脉冲,此刻SN54HC74的Q输出为高,此信号用来操控旋转变压器/数字转化模块的INH,此刻渠道惯导内部旋转变压器输出的俯仰、横滚、航向3个姿势角的粗精通道正余弦模拟信号进入19XSZ2413一S32旋转变压器/数字转化模块,这是电路作业的初始状况。之后旋转变压器/数字转化模块通过编程操控地址译码的输出,完结三路模块一起作业或单路模块作业。其间,对3块旋转变压器/数字转化模块CB信号的操控选用查询方法,CB用来操控锁存器U1,U2和U3(SN74HC373)的使能端LE,因为输出为19位数字量,所以选用3个SN74HC373,当数据转化完结之后,CB主动变为低,从而使能LE,当CPU读取数据时,锁存器OE使能,19位转化数据一起打入3个锁存器等候CPU的读取。
2.3 脉宽操控电路
脉宽操控电路首要用来操控ISA接口板上的I/O CSl6,当I/O CSl6信号有用时,告诉体系板当时的数据传送是一个有等候状况的16位I/O周期。在电路调试中通过调理R1,C11的巨细可以操控I/O CSl6低脉冲的时刻,使得通过ISA总线读取低16位数据时正确安稳。现在电路中选用3个旋转变压器/数字转化模块别离操控三路视点量信号的转化输出,当INH为逻辑“O”之后,通过600 ns的延时,CB为“O”,CPU即
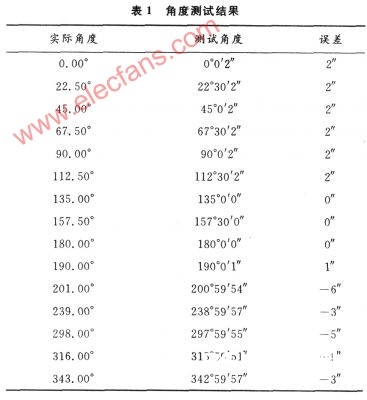
4 试验成果
使用试验室已有的数字/旋转变压器板发生的信号作为输入,视点测验成果如表1所示,试验成果表明测角精度可以到达10”,满意精度要求。
5 结 语
该接口电路现已使用在某渠道惯导3个姿势角的丈量中,作业正常,证明该电路规划合理。在电路中测角精度到达10”,可以满意精度要求,更重要的是缩短了该渠道惯导体系三个姿势角的测角周期,到达使用的意图。






