


方波驱动的无刷直流电机因为力矩大,运转牢靠,在电动车操控器中广泛应用,方波驱动最大的缺陷在于换相时的电流骤变引起的转矩脉动,导致噪声较大,但好的操控战略能够大大改进换相噪声。电动车操控器规划的难点在于电流操控,本文就电动车操控器规划的一些要害当地加以描绘。
1.概述
电动自行车上运用的电机遍及选用永磁直流电机。所谓永磁电机,是指电机线圈选用永磁体激磁,不选用线圈激磁的办法。这样就省去了激磁线圈作业时耗费的电能,提高了电机机电转化功率,这对运用车载有限动力的电动车来讲,能够下降行进电流,延伸续行路程。
永磁直流电机依照电机的通电办法来分,可分为有刷电机和无刷电机两大类,有刷电机因为选用机械换相设备导致牢靠性和寿数下降,因而逐步退出电动车市场。
无刷电机又可分为有传感器和无传感器两类,关于无方位传感器的无刷电机,必需求先将车用脚蹬起来,等电机具有必定的旋转速度今后,操控器才干识别到无刷电机的相位,然后操控器才干对电机供电。因为无方位传感器无刷电机不能完成零速度发动,所以现在出产的电动车上用得较少。现在电动车行业界运用的无刷电机,遍及选用有方位传感器无刷电机。
有方位传感器永磁直流无刷电机依照内部传感器的装置方位不同,又可分为60度电机和120度电机。在120°的霍尔信号中,不可能呈现二进制000和111的编码,所以在必定程度上防止了因霍尔零件毛病而导致的误操作。因为霍尔组件是开漏输出,高电平依托电路上的上拉电阻供给,一旦霍尔零件断电,霍尔信号输出便是111.一旦霍尔零件短路,霍尔信号输出便是000,而60°的霍尔信号在正常作业时这两种信号均会呈现,所以必定程度上影响了软件判别毛病的准确率。因而现在市道马达现已逐步放弃60°相位的霍尔摆放。
2.永磁直流电机根本原理
2.1.主回路电路
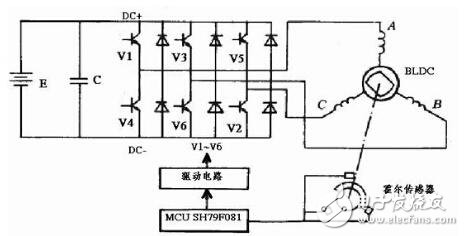
图中ABC表明电机的3相绕组,选用星形接法,V1~V6表明功率场效应管,假如将V1~V6用如下的时序波形驱动,则3相绕组会依照AB-AC-BC-BA-CA-CB次序通电(AB表明电流由A相流向B相),发生一个旋转的磁场,牵引外转子(永磁体)旋转。
导通次序

3.电动车操控器功用要求
*功用性要求:1.电子换相2.无级调速3.刹车断电4.附加功用A.限速B.1+1助力C.EBS柔性电磁刹车D.定速巡航E.其它功用(消除换相噪音,倒车等)
*安全性要求:1.限流驱动2.过流维护3.堵转维护4.电池欠压维护5.下降温升6.附加功用(防盗锁死,温升约束等)
7.附加毛病检测功用从上面的要求来看,功用性要求和安全性要求的前三项用专用操控芯片用加上恰当的外围电路均不难处理,代表芯片是摩托罗拉的 MC33035($1.8840),前期的操控器计划均用该集成块处理。但后来跟着竞赛加重,许多厂商都增加了不少附加功用,一些附加功用用硬件来完成就比较困难,所以运用单片机来做操控的操控器敏捷替代了纯硬件的专用操控芯片。
可是硬件操控和软件操控有很大的差异,硬件操控的反应速度只是受限于逻辑门的开关速度,而软件的运转则需求指令履行时间。要使软件跟得上电机操控的需求,就必需求求软件在最短的时间内能够正确处理换相,电流约束等各种杂乱动作,这就涉及到一个对外部信号的采样频率,采样机遇,信号的内部处理判别及处理结果的输出,还有一些抗干扰办法等,这些都是软件规划中需求细心考虑的东西。
在本计划中,咱们选用了一颗集成PWM发生器的8位单片机SH79F081,选用优化的单机器周期8051内核,内置16kFlash存储器,兼容传统 8051一切硬件资源,选用JTAG仿真办法,内置16.6MHz振荡器,一起扩展了如下功用:*双DPTR指针。16位x8乘法器和16位/8除法器。
*3通道带死区操控PWM,6路输出,输出极性可设,供给周期溢出功用*集成毛病检测功用,可瞬时封闭PWM输出。
*供给硬件抗干扰办法。
*集成高速10bitADC.*供给Flash自编程功用,能够模仿用做EEROM,便利存储参数。
这颗IC因为CPU运转速度和AD采样速度都很快,PWM功用强大,硬件抗干扰功用多,十分适协作电动车操控器。
4.软件完成
下面咱们挑选对操控器功能和安全比较重要的功用来评论编程中应该留意的问题。
4.1.减小换相噪声
上文已提过,无刷直流电动机方波驱动最大的缺陷是换相时电流不能继续,导致有转矩脉动,因而衡量操控器好坏很大程度上是取决于换相是否能做好。
在电动车刚刚起步的时分咱们会发现换相时电机会宣布很大的突突声,这是因为电机起步时电流比较大,而电机是个理性负载,换相后因为电机线圈电流不会一下增大到换相前的水平,这样就形成换相前后电流反差十分大,然后导致牵引力的急剧改变,这种改变便会引起电机激烈振荡,这种振荡噪声不能彻底消除,但能够采纳一些办法减小噪声办法1:在换相后的一段时间使PWM脉冲占空比到达100%来使电流增加快一点,然后减轻振荡噪声。需求提示的是在这个过程中咱们需求随时监测电流改变,电流一到达换相前的水平就能够康复换相前的PWM占空比。
办法2:推迟封闭换相MOS管,方波驱动直流无刷电机是 6步驱动,定子励磁每隔60度电视点跳动一次,确保定子磁动势方向和转子磁动势方向夹角在60°到120°之间运转,因为夹角在90°时滚动力矩最大,夹角为0°或180°时没有转矩,现假定电机正转,AB导通要切换到AC导通,此刻AB绕组通电发生的定子磁势和转子磁势夹角为60°,假如正常切换到AC 导通,则AC绕组通电后,定子磁势和转子磁势夹角变为120°,因为切换到AC通电后电流要从0开端爬高,因而此刻定子磁势幅值很小,导致转矩下降,但假如此刻不封闭B,一起将下桥C翻开,则定子磁势和转子磁势的夹角变为90°,并且因为AB相电流根本没有改变,而C相电流还很小,因而换相前后转矩改变很小,但要留意,等C相电流爬高后要将B相封闭,不然3相导通的组成力矩比2相导通力矩大,也会发生转矩动摇。
4.2.电子刹车:
电子刹车其实是将电动机作为发电机机运转,因而会发生电磁制动转矩,检测到电子刹车信号后,cpu将上三路PWM封闭,将下三路一起翻开,占空比设为某一固定值,这样,电机相当于作业在发电机状况,给蓄电池充电,充电电流和下三路占空比有关,占空比越大,则充电电流越大,剎车制动才能越强,因为现在电动车上安装的电子剎车都是开关信号,运用者无法调整剎车力矩,彻底由操控器决议,不过由电动机的特性,即便占空比固定,电子剎车时转速越高,发电机感生电压越高,回馈充电才能越强,剎车力矩越大,当然,最好是安装线性剎车传感器,运用者会更便利。
4.3.恒流驱动
电流信号经康铜丝采样之后分两路,一路送至扩大器,一路送至比较器。扩大器用来实时扩大电流信号,扩大倍数大约6.5倍,扩大后的信号供给给单片机进行 AD采样转化,转化所得数字用来操控电流不超越咱们所答应的值。另一路信号送至比较器,当电流忽然因为某种原因大大超越答应值,比方一只MOSFET击穿或误导通时,比较器翻转送出低电平,送给79F081的FLT引脚,无需单片机履行程序,%&&&&&%硬件会主动封闭PWM输出,然后维护MOSFET防止更大损伤。






