


项目布景及可行性剖析
1.项目名称、项目的首要内容及现在的发展状况
项目名称: 根据FPGA的组合导航体系
项目的首要内容及现在的发展状况:本项目首要研讨根据MicoBlaze导航处理器的组合导航的效果原理及其完结。现在现已完结大部分软件程序的编制,现已完结外围电路模块的研发作业。
2.项目关键技能及立异点的论说;
(1) 选用低成本MEMS加速度计和陀螺仪规划惯导单元。
(2) 引进3轴磁阻传感器处理惯导单元的初始对准问题。
(3) 选用GPS+IMU+COMPASS的结构来规划自主导航体系。
(4) 多传感器冗余技能,满意多种需求。
(5) 选用气压计取得高度信息。
(6) 根据MEMS惯性器材的初始对准。
(7) 选用Labview规划体系演示界面。
3.技能老练性和可靠性论说:
微型惯性传感器与传统的惯性传感器比较,具有体积小,重量轻,成本低,功耗低,可靠性高和寿命长等优势。在车辆导航和操控,机器人,无人机导航,兵器制导等范畴有着宽广的使用远景。但是现在其精度还比较低,导致其使用遭到必定的约束。GPS接收机与微型惯性丈量单元的结合能够扬长避短,大大提高输出数据更新率,避免导航定位差错随时刻堆集,而且提高了可靠性和抗干扰才能,为低成本,轻小型导航与制导体系供给了一个十分有吸引力的计划,成为规划者的最佳挑选,也是现在导航定位技能发展的首要方向之一。
现在购买一套国外的低成本的组合导航设备的价钱也在10万元以上,为了降低成本使导航设备愈加契合车辆等民用场合的导航。咱们选用ADI的低成本的加速度计和陀螺仪使用PowerPc处理器规划了一个齐备的导航体系。
项目施行计划
1.计划基本功用框图及描绘
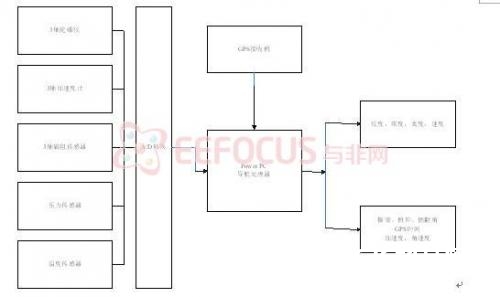
2.需求的开发渠道
通过具体的剖析证明本计划选用Spartan-3E开发渠道进行规划完全能够满意体系的需求。
3.计划施行过程中需求开发的模块
本计划中需求研发惯性导航单元,首要包含电子罗盘模块,压力计模块,加速度模块,陀螺仪模块和温度模块。以上模块都选用自己购买相应元器材进行开发的方法进行。
4.体系终究要到达的性能指标
论说本项目终究完结时所想象到达的政策。
本计划终究要到达一下政策
准确而实时方位坐标。
不受动态学影响的高精度航向角。
经气压高度表校正后的准确海拔高度。
准确的沿着3个轴向的速率和加速度。
准确的3个轴向角速度。
需求的其它资源
1.规划输入输出功用子板
子版选用SPI接口与主板通讯,输出口选用主板上的串行口进行输出。
2.测验设备
测验设备现在仅有万用表、示波器这两个设备。
3.政策、开发工具
ISE,Embedded Development Kit (EDK) and Platform Studio,modsim。






