


摘要:为满意无人机操控律参数调理及后期操控战略优化的需求,以某型无人机为运用布景,提出了一种无人机飞翔操控体系地上仿真渠道的规划方案。首要剖析了该渠道的整体规划方案,然后介绍了首要分体系的规划,最终给出界面显现和半物理仿真成果。半物理仿真成果标明:该渠道规划合理,具有必定的工程价值。
关键词:无人机飞翔操控体系;整体方案;分体系;仿真渠道;界面显现
无人机的用处日渐广泛,功用日趋完善,其飞翔操控体系逐步杂乱,不确定要素也越来越多。飞翔操控体系作为无人机的中心,对无人机安全飞翔、有用完结使命具有着及无足轻重的效果,为确保操控软件的可靠性,需求树立相应仿真体系对其进行验证。
无人机飞翔操控仿真现在首要包含数字仿真和半物理仿真。半物理仿真将体系部分什物引进仿真回路,尽可能实在模仿现场状况,较数字仿真更能有用验证飞翔操控体系的可靠性,尤其在初期试飞调参及后期操控战略改善阶段,运用广泛。
文中运用现有的工程化辅助工具,树立无人机飞控规划与仿真实验渠道,可用于无人飞翔器的建模、飞翔操控体系研讨和开发、工程完结、半什物仿真和飞翔实验各个阶段。
1 整体方案
以规范化体系结构为规范,运用核算机技能和工业规范总线技能,构建高功用飞翔实时仿真体系,以满意可靠性、可用性和易保护性要求。一起,作为先进飞翔操控体系和航空电子关键技能的验证渠道,还要满意体系的模块通用性、资源的可装备、可重构和可测验性。
将飞翔仿真核算机、地上测控核算机、飞翔操控核算机、惯性导航、三轴模仿转台、负载模仿器及履行舵机等单元闭环衔接,构成半物理仿真体系,如图1所示。
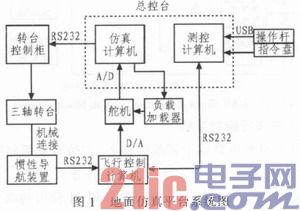
如上图所示地上仿真体系装备舵机的测角设备实时采样验证机的舵面运动信号,经过仿真核算机解算验证机空中的飞翔运动特性,发生转台运动的鼓励信号,仿真核算机将此信号经过串口通讯传给转台操控柜,操控转台模仿飞翔器姿势改变,因为惯性导航设备安装在转台上,惯性导航设备将感受到的信号传给飞控核算机,飞控核算机依据操控律对当时的状况进行操控,并将解算出的姿势信号、飞翔数据等经改换后传给舵机,舵机发生动作,舵机测角设备将测到的视点经过转化经过并口传给仿真核算机,然后构成闭环操控。
2 首要分体系规划
2.1 无人机仿真体系
人机仿真体系是整个半物理仿真体系的一个首要部分,它的核算使命深重,与其它分体系的联系密切,输入/输出参数量大。
仿真核算机选用台湾研华公司的工控机,研华ADAM562V主板,CPU为PⅣ3.0G,DDR/2G内存,250G硬盘,128M独立显卡,19英寸LCD显现器,并配有型号为PCLS-711的模仿输入接口板卡。型号为PCIS-722的数字接口。
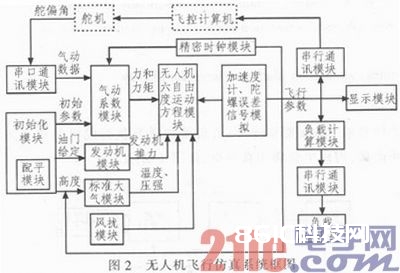
无人机数学模型为六自由度非线性全量运动方程,具有高阶多变量非线性时变特性。仿真软件用四元数核算姿势角,四阶龙格库塔法解算动力学微分方程。飞翔仿真体系的数学模型非常杂乱,为使软件逻辑清楚、界面明晰,需求进行模块化规划,依照模块化建模的思维,将动力学模型分解为气动系数模块、发动机模块、风扰模块、大气模块、初始化配平模块、串口通讯模块、多媒体时钟模块、绘图模块、加速度计、陀螺差错模仿模块、负载核算模块和无人机动力学方程模块,各模块之间的信息传递联系如图2所示。
2.2 无人机飞翔操控体系
飞翔操控体系是整个体系的中心,它担任着体系数据的收集、余度办理和操控律的核算等重要使命。
该地上仿真渠道中飞翔操控器选用TI公司的高功用处理芯片TMS320F28335,该芯片是一款TMS320C28X系列浮点DSP操控器,具有精度高,成本低,功耗小,功用高,外设集成度高,数据以及程序存储量大,A/D转化更准确快速等长处,并具有TI公司所开发的功用强大的CCS软件渠道。
飞控软件依照软件T程规划原则,选用模块化结构进行规划,运用C言语编程。软件首要由初始化模块、中心办理模块、自主导航模块、遥控遥测模块、容错模块和输出模块等组成。其体系图如图3所示。
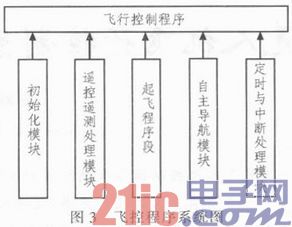
在上图中初始化模块完结体系软、硬件的初始化以及参数的设置,完结主板、AD/DA和串口等硬件设备的初始化以及中止设置等;遥控遥测模块接纳并履行地上指令以及发送遥测数据;起飞和着陆模块别离操控无人机的起飞和着陆;自主导航用来对无人机进行按航路自主导航;守时与中止处理模块完结与时刻有关的周期性使命和中止办理等。
2.3 无人机地上测控体系
无人机测控体系首要用于传输地上操作人员的指令,用于传送无人机的状况参数、方位坐标等信息给地上站,实时显现无人机的飞翔参数、飞翔姿势、航向和航迹,还可以对飞翔数据进行保存和回放。
无人机地上测控体系由测控核算机完结,测控核算机的主板为研华ADAM-562V,测控汁算机是在Windows环境下运转的核算机,操作杆经过USB接口接入测控核算机,RS232为规范通讯接口,将键盘介入板卡上,输出接至显现器,这部分完结了离散指令的输入和输出;将操作杆接到PC机上,完结接连指令的输入和输出。
关于实时飞翔操控的相关功用来说,最重要的是确保对无人机飞翔操控操作的准确性与实时性,这就需求规划一种尽可能简略直观、便于地上操作人员操作的人机交互界面。本测控软件选用Windows 2000操作体系,以VC++6.0为开发环境,运用MFC,运用自顶向下的规划办法,将程序从体系架构上划分为3个层次,6个子模块来进行开发。如图4所示。

在测控软件中,输入模块担任响应和处理地上操作人员的各种操作,飞翔操控模块依据地上操作人员的输入安排遥控指令帧序列,调用通讯模块的接口向机载体系发送遥控指令帧,飞翔状况监测模块担任从数据存储模块读取并剖析遥测帧数据,向图形显现模块供给飞翔状况以及遥测数据剖析成果。数据存储与保护模块既存储从通讯模块获取的遥测帧数据,也记载测控核算机发送的遥控指令帧,一起供给读写接口以供其他模块调用。通讯模块首要担任各个模块间的数据和指令传输,显现模块用于显现无人机的飞翔状况、遥测数据及参数曲线。
3 半物理仿真界面显现
3.1 仿真软件界面显现
仿真软件首要用来飞翔器动力学解算,即完结飞翔器飞翔动力学的实时数字仿真运算,依照模块化规划思维,在VC++6.0的环境下,根据MFC,规划界面如图5所示。
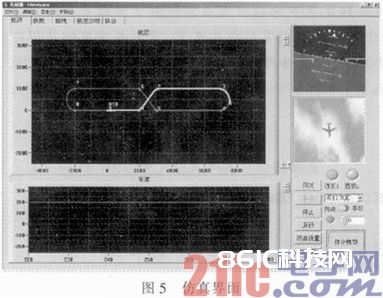
在该界面中显现自主飞翔时的航迹、高度、飞翔参数和姿势改变的曲线,也可以用来航迹加载,规划满意了要求。
3.2 半物理仿真实验
在无人机飞翔操控体系的研讨与研发过程中,半什物仿真占有了较大的实验内容。如图1所示的体系图,将各个分体系依照正确的方法衔接起来,操作过程如图6所示。
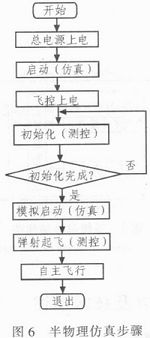
无人机自主飞翔航迹如图7所示。
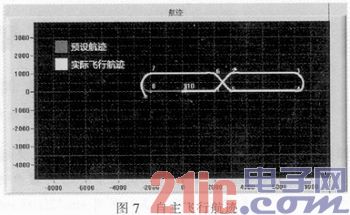
由图7可知,无人机可以依照预设的航迹自主飞翔,整个过程中,直线段部分,无人机航迹偏距较小,在转弯部分,偏距较大些,可是偏距在差错范围内,在第8个航点时,无人饥完结自主飞翔使命,自主下降。半物理仿真实验标明:该仿真渠道可行,具有必定的工程运用价值。
4 结束语
文中所提及的无人机飞翔操控体系地上仿真渠道已做成制品,而且具有无人机进行飞翔状况人工引导飞翔和自主飞翔全过程物理仿真实验、查验无人机飞翔操控体系技能可行性的功用,为今后无人机的研讨奠定了坚实的根底。






