


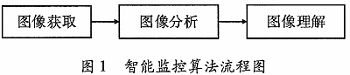
智能化是现代视频监控体系的重要开展方向,方针盯梢成为开展过程中一项不行短少的重要功用。智能监控技能是指在不依赖人为干涉的情况下,选用计算机技能和图画处理技能对摄像机拍照的图画数据进行主动剖析,完结对图画内容意义的了解以及对客观场景的解说。智能监控算法流程如图1所示。
本文在研讨视频盯梢体系相关算法和硬件结构的基础上,规划一套依据ADSP-BF561的视频盯梢体系,经过操控摄像机姿势完结对监控场景中的运动方针进行主动识别和盯梢,契合现代视频监控体系向智能化开展的趋势。
1 体系整体规划方案
嵌入式处理器中数字信号处理器(Digital Signal Processor,DSP)具有强壮的数字信号处理功用,适用于视频图画、语音等很多数据的实时处理。ADSP—BF561是一款集音频、视频图画处理和操控于一身的双核DSP,具有高速的内核时钟、灵敏的存储器架构和专用的视频接口,在视频图画处理方面具有较大优势。
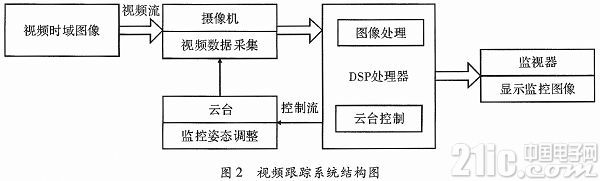
选用ADSP—BF561作为处理器规划视频盯梢体系硬件渠道,体系渠道由DSP处理器、摄像机、监视器和云台等部分组成,体系结构如图2所示。硬件结构中摄像机和云台两部分固定为一体,云台的运动反映摄像机监控姿势的调整。DSP经过对摄像机收集的视频图画数据进行盯梢图画处理,获取运动方针所在方位,并在监视器上实时显现监控图画。DSP依据方针方位信息发送云台操控指令,操控云台运动,调整摄像机监控姿势,使运动方针保持在监控中心邻近,完结主动盯梢功用。
2 硬件规划
2.1 硬件体系整体规划
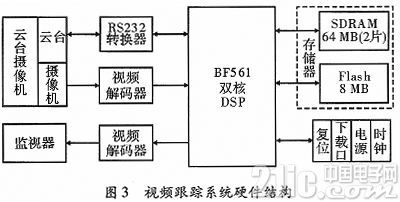
体系选用嵌入式ADSP—BF561为中心处理器构建视频盯梢体系硬件渠道。体系硬件渠道首要由BF561处理器、2自由度云台摄像机、RS232转化器、存储器、视频编码器、视频解码器、监视器、复位电路、下载调试接口、电源和时钟等部分组成,硬件体系结构组成如图3所示。
图画收集设备和盯梢单元选用2自由度云台摄像机,该模块内部集成了摄像体系、云台体系及通讯体系3部分。由摄像机收集视频信号并经过视频解码芯片送至DSP,经视频图画剖析确认盯梢方针方位,由模仿彩色电视机作为监视器显现监控视频图画。与此一起,DSP经过发送相应指令操控云台运动,完结了运动方针一直处于监控规模内,完结主动盯梢功用。
2.2 视频编解码器
视频编解码器是视频盯梢体系的重要组成部分,摄像机输出的视频信号和监视器直接播映的视频信号均为模仿信号。视频信号在进入DSP处理前有必要进行A/D转化成数字信号,DSP处理后的视频信号也需求进行D/A转化。
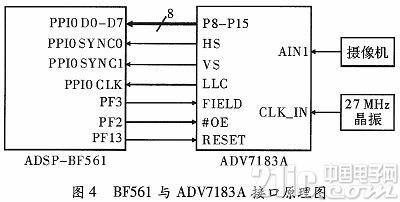
视频解码器即完结A/D转化功用的器材,体系选用ADI公司的ADV7183A。ADV7183A是一款集成式视频解码器,无需任何装备便能主动检测NTSC、PAL和SECAM制式的模仿基带电视信号,并转化成YUV4:2:2格局的数字视频信号。BF561与ADV7183A接口原理如图4所示。
2.3 视频编码器
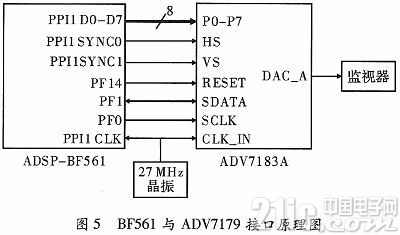
视频编码器即完结D/A转化功用的器材,体系选用ADI公司的ADV7179。ADV7179为集成式视频编码器,其可将ITU-656格局的YUV4:2:2数字视频信号转化成PAL、NTSC等规范制式模仿电视信号。因ADV7179需求用I2C总线对其进行装备,但BF561内部并未集成I2C总线,因而使用软件模仿I2C总线进行通讯。BF561与ADV7179接口原理如图5所示。
2.4 RS232转化器
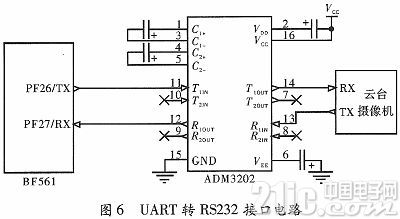
体系选用Winyork公司MCC-INOS云台摄像机,它支撑工业规范RS232总线,规范UART可经过RS232电平转化取得,所选用的电平转化芯片为ADM3202,其与BF561接口电路如图6所示。将RS232总线经电平转化后与DSP通用异步收发器接口相连,从而与摄像机的云台进行通讯。
3 软件规划
3.1 DSP双核资源规划
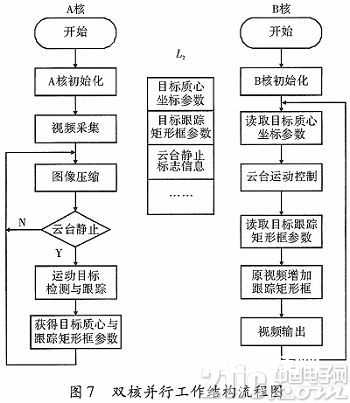
体系选用ADI公司的DSP芯片BF561作为主处理器,BF561内有双核共同结构,给体系规划带来便利。BF561双核共同结构,既可彼此独立工作,也可和谐处理并行工作,进步运算速度。依据视频盯梢处理算法,可对A核和B核作业进行合理分配,使其既彼此独立互不搅扰,一起共同完结主动视频盯梢功用。其间,A核首要作业是完结运动方针检测与盯梢,B核首要作业内容是完结云台运动操控算法的完结,同享存储器L2作为双核公共存储器首要用于双核间的信息交互。其详细作业内容如下:
(1)A核。完结视频图画收集存储至外存储器中;将外存储器中的图画数据传输至内核存储器中;进行运动方针检测及盯梢运算,计算出方针质心坐标并求出方针盯梢矩形框。
(2)B核。依据A核计算得到的方针质心坐标,完结云台运动操控算法;经过串口通讯操控云台摄像机盯梢运动方针;将原视频图画添加方针盯梢矩形框,完结视频数据实时输出至监视器。
(3)同享存储器L2。存储A核与B核通讯数据与同享数据,首要包含盯梢方针质心坐标、方针盯梢矩形框参数信息和云台停止标志信息等。
依据体系规划可知,BF561选用双核协同作业办法,其双核并行作业结构流程如图7所示。
3.2 视频收集
DSP选用PPI0进行整场图画形式收集,并将整场图画数据存放于外部存储器SDRAM中。摄像机输出复合视频信号经视频解码器AD7183转化成每秒25帧,每帧625行,每行864点像素,每点像素2 Byte视频信号,由PPI0以DMA办法传输至SDRAM,并以PAL整场形式存储,完结视频收集。其PPI0 DMA详细装备如下:
*Pppi0_CONTROL=0x0183;//输入形式,整场形式,32包装形式
*Pppi0_FRAME=625;//接纳总行数
*Pdmal_0_X_COUNT=864*2/32;//每行接纳包次数,32 Byte包装
*Pdmal_0_Y_COUNT=625;//接纳总行数
*Pdmal_0_X_MODIFY=32;//传输间隔
*Pdmal_0_Y_MODIFY=32;//传输间隔
3.3 运动方针检测及盯梢
运动方针检测及盯梢算法为体系软件的中心,现被处理视频亮度信息(Frame_Compress)存储于片上同享存储器L2中,并在DSP的A核中完结运动方针检测和盯梢算法,求出方针质心坐标与盯梢矩形框四极点坐标参数。
运动方针检测及盯梢中心算法程序流程如图8所示,首先将已紧缩的接连3帧图画进行三帧差分运算得到灰度图画*Gray_Image,并经二值化、形态学滤波处理取得精确的运动方针图画* Binary_Image。方针图画经过连通域符号处理得到一组与图画巨细共同的符号信息*Conneted_Image,并经卡尔曼盯梢模型确认面积最大方针在本帧图画的方位参数,包含方针质心坐标(X_CENT,Y_CENT)和盯梢矩形框四极点坐标((X_Left,Y_Up),(X_Right,Y_Up),(X_Left,Y_Down),(X_Right,Y_Down))。
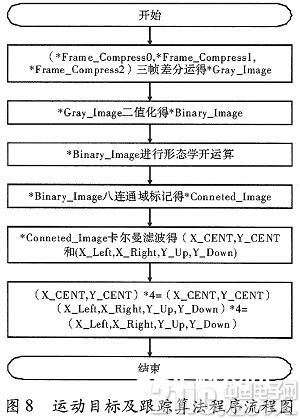
因为运动方针检测及盯梢算法是针对紧缩后的图画进行处理,故方针质心坐标和盯梢矩形框四极点坐标均需扩大4倍处理,从而还原成实践图画参数值。最终将得到的实践方针坐标及盯梢矩形框四极点坐标存放于同享内存L2中,使得B核可直接调用。
3.4 云台操控
云台工作操控由BF561中的B核处理完结,B核调用同享内存L2中的方针质心坐标(X_CENT,Y_CENT),完结对云台的操控。为完结对运动方针的有用盯梢,需在实践有用分辨率为720×576图画进行三级虚拟线圈区分,详细区分参数如图9所示。
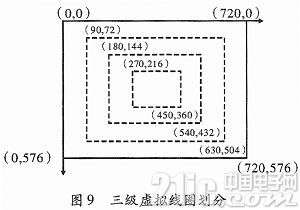
体系经过判别方针质心坐标是否超出虚拟线圈,决议云台是否旋转,并结合所选摄像机云台功能特色,将云台移动所需视点和角速度进行设定。选用多级线圈,较好地处理了一级线圈的缺乏,不只使方针尽可能地处于中心邻近,一起也可依据方针移动的速度调整摄像机的旋转速度,从而使摄像机旋转愈加平稳,取得更好的盯梢作用。
3.5 视频输出
监控的视频图画存储于外部存储器SDRAM中,并由B核操控PPI1输出至视频编码器,完结在监视器上的实时播映。在视频数据输出前,可在原图画的基础上添加方针盯梢矩形框进行辅佐显现,其矩形框4极点坐标存储于同享内存L2中,B核可直接在原图画数据中添加矩形框数据。
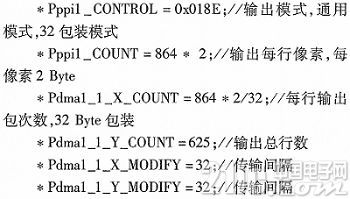
BF561视频图画输出办法不同,体系选用在缓存中静态树立一个整场形式的办法,即存储器内已是规范ITU-656视频格局,此刻按地址次序直接经过PPI输出即可。PPI以DMA的办法进行传送,详细装备如下:
4 体系测验
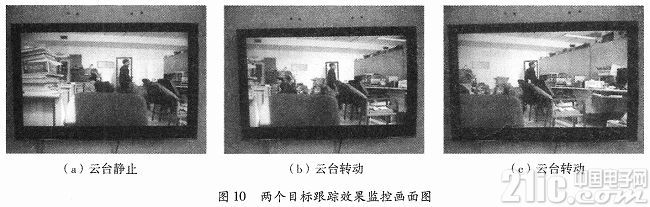
运动方针主动盯梢体系,首要经过操控云台摄像机的姿势使运动方针保持在监控规模内,并经过辅佐矩形框确定方针加以提示。当监控规模内呈现运动方针时,监视器内便呈现盯梢矩形框确定运动方针。假如运动方针移动至间隔监控画面边际必定间隔时,摄像机将滚动使方针回到监控画面中心邻近。盯梢作用监控画面如图10所示,体系主动识别运动人员并用矩形框确定,如图10(a);当运动方针移动至监控窗口内必定规模时,云台产生滚动如图10(b)和图10(c)。
5 结束语
文中依据ADSP-BF561为中心处理器规划一套主动视频盯梢体系,对智能监控体系中关键技能的完结进行研讨,包含运动方针检测、方针盯梢算法、硬件渠道建立及摄像机的运动操控等。试验标明,体系可快速主动识别运动方针并进行盯梢,且具有必定的实时性及稳定性。因为时刻约束,体系在规划上依然存在缺乏,在多个方面仍需进一步完善。






