智能飞翔器是指由无线电地上遥控飞翔或和自主操控飞翔的可笔直起降的不载人飞翔器。近年来,智能飞翔机技能日趋老练,功用不断完善,逐渐向小型化、智能化、隐身方向开展,其更多地用于抗震救灾,交通管制等范畴。而地震等各种自然灾祸频发且灾祸的不行预知性及发生灾祸地址的特别地貌特征,使救援人员一般很难在第一时刻进入灾区获取到灾情信息,或是在不利于人作业业的区域进行勘探和侦查,对灾区救援作业带来很大的不方便。因而,选用先进的技能规划一款智能,小型化的飞翔器能实时进行灾区状况监测就显得尤为重要。本体系在嵌入式ARMv7架构下,经过模块化思维规划了一款重量轻、动力足、能够长途操控和自主导航飞翔的飞翔器。
1 体系的整体规划
1.1 体系整体规划框图
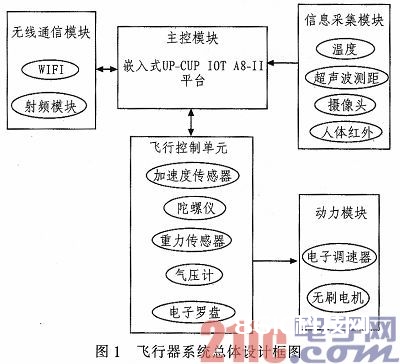
该体系选用嵌入式为开发渠道,经过模块化的思维进行了智能监控飞翔器体系规划,首要由主控模块、飞翔操控模块、信息收集模块、无线通讯模块、动力模块等五大模块组成。其间飞翔器体系整体规划框图如图1所示。
1.2 体系各模块功用分析
1)主控模块
本体系选用博创物联网嵌入式UP—CUP IOT A8-II渠道作为主控单元,首要担任接纳和处理收集模块发送的数据、在接纳无线传输模块发送的操控指令的一起并向飞翔操控模块发送飞翔器操控指令,将实时视频数据和传感器数据经过无线传输模块发送至操控端。该渠道内置Cortex—A8中心,依据ARMv7架构的使用处理器,具有强壮的NEONTM信号处理扩展集,含ZigBee无线传感器模块、RFID射频读卡模块、Bluetooth蓝牙通讯模块、GSM/GPRS通讯模块。别的可直接外扩多种通讯模块,如WIFI、3G、GPS等,能够满意各种使用的需求。
2)飞翔操控模块
该模块首要包含陀螺仪、加速度传感器、重力传感器、气压计、电子罗盘等传感器,各部分的功用如下:
陀螺仪:三轴陀螺仪的功用首要在空中检测飞翔器的飞翔姿势。当飞翔器发生偏转时,检测并经过积分核算出偏转的视点,实时了解飞翔器的飞翔状况,然后进行飞翔姿势的校对。
加速度传感器:使用了其内部加速度形成晶体变形的特性发生电压。本体系经过加速度传感器来获取当时飞翔器在三维空间里的线性加速度,合作陀螺仪传感器,然后核算当时的飞翔姿势。
重力传感器:能够丈量出当时飞翔器与重力方向的夹角,然后判别出飞翔器是否处于水平状况。一起,经过重力传感器丈量由于重力引起的加速度,能够核算出飞翔器相对于水平面的歪斜视点。
气压计:能主动接连记载气压随时刻的改动。经过核算气压的改动,便能够大略核算出当时飞翔器的海拔高度,合作信息收集模块中的超声波传感器,便能够准确丈量出当时飞翔的高度。
电子罗盘:电子罗盘也叫数字指南针,是使用地磁场来定北极的一种办法。经过电子罗盘,飞翔器便能够准确得出当时飞翔器的方向,然后检测飞翔器是否发生了旋转,而且校对当时的方向视点。
3)信息收集模块
该模块首要包含如下传感器:
超声波测距:选用了相似雷达的原理,经过向外发射超声波,并接纳反射回的超声波,然后精准的核算出当时间隔障碍物的间隔。超声波测距模块可提供3 cm~3.5 m的非触摸式间隔感测功用。本体系经过超声波测距,丈量出当时飞翔器准确的高度。也可经过超声波测距模块,循环读取高度信息,然后主动调整螺旋桨动力巨细,完成定高悬停及主动下降。
摄像头:摄像头(CAMERA)担任收集视频信号。本体系摄像头模块选用中星微ZC301视频芯片,该处理芯片让视频的处理速度更快,它能够在640×480及800×600的分辨率下轻松到达30fps的速度,能够确保视频的流通传输,彻底消除跳动感,并能够充分使用网络传输带宽。
人体红外传感器:依据红外线技能的主动操控模块,本传感器选用德国原装进口LH1778探头规划,灵敏度高,可靠性强,超低电压作业形式,广泛使用于各类主动感应电器设备,尤其是干电池供电的主动操控产品。由于该模块能够检测到地下5~7 m的人体红外,本体系经过该模块来检测飞翔器下方是否有生还者。假如发现生还者,则当即向操控者宣布警示。
4)无线通讯模块
该模块首要由具有USB接口的WIFI无线网卡和2.4G的射频模块组成。经过驱动USB无线网卡,并建立AD—HOC点对点网络,完成飞翔器与手持终端(如智能手机、平板电脑)和PC之间的通讯。采样2.4G的射频模块和遥控器之间进行通讯。
5)动力模块
动力模块首要包含:无刷电子调速器、XXD 2212无刷电机。
无刷电子调速器:电子调速器(Electronic Speed Controller),简称ESC。它能够依据操控信号调理电动机的转速。
无刷电机:无刷直流电机由电动机主体和驱动器组成,本体系经过主控模块发送电子调速器的操控信号,操控4个电机不同的转速,然后改动飞翔器的飞翔动作。
2 体系的硬件规划
2.1 信息收集模块整体电路规划
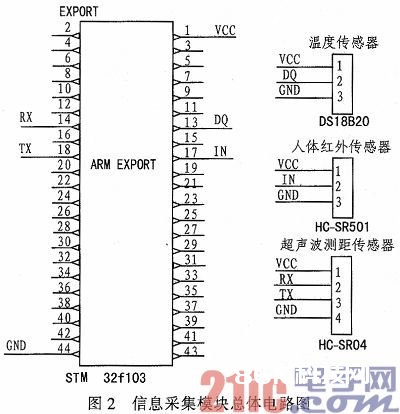
信息收集模块首要由DS18B20(温度传感器)、HC—SR501(人体红外传感器)、HC—SR04(超声波测距传感器)等几部分组成,其间这三者之间和contex—A8整体电路图如图2所示。
2.2 信息收集各分模块的电路规划
1)HC—SR501人体红外感应模块
HC—SR501是依据红外线技能的主动操控模块,选用德国原装进口LH1778探头规划,灵敏度高,可靠性强,低电压作业形式,能广泛使用于各类主动感应电器设备。
2)DS18B20温度传感器
DS18B20选用单线接口通讯的方法,结构简略无需其他元件电路,抗干扰能力强,适合于多种环境下的温度收集。
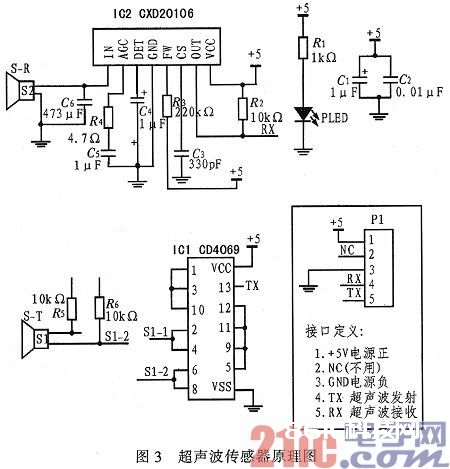
3)HC—SR04超声波传感模块
超声波传感器原理图如图3所示。