


文章转自ADI官网,版权归属原作者一切
摘要
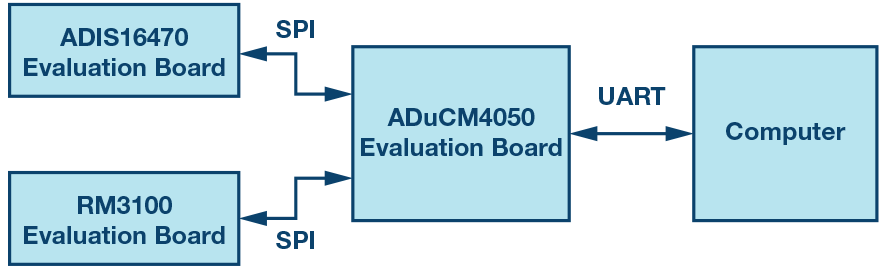
本文旨在介绍咱们运用ADI公司的惯性丈量单元(IMU)传感器 ADIS16470 和PNI的地磁传感器RM3100构建的捷联惯性导航体系(SINS)。完成了根据磁力、角速率和重力(MARG)的SINS的一些根本进程,包含电磁罗盘(地磁传感器)校准、运用扩展卡尔曼滤波器(EKF)的姿势和航向参阅体系(AHRS)和航迹盯梢。还完成了运用最小平方差错(MSE)办法的松耦合传感器交融技能。文章展现了每个进程过程运用的算法和试验设置。本文最终评论了成果剖析和用于进步导航准确性的办法。
简介
跟着服务机器人商场和技能的开展,导航已成为研讨和运用中的一个热门。与车辆、船只或飞机比较,服务机器人体积小,本钱低,因而它们的导航体系应该具有捷联和低本钱的特色。传统的安稳渠道导航体系一般要选用独立的加快度计和光纤或激光陀螺仪,一切传感器都机械且刚性地安装在与正在移动的车辆阻隔的安稳渠道上。这导致了尺度大、可靠性差、本钱高的缺陷。相反,在捷联惯导体系中,惯性传感器直接固定在车辆本体上,这意味着传感器会与车辆一同旋转。这种捷联办法消除了安稳渠道惯导的缺陷。可是,渠道惯导的准确性一般高于SINS。渠道惯导往往能够抵达战略级(0.0001°/时的陀螺仪偏置,1μg的加快器偏置)或军用级(0.005°/时的陀螺仪偏置,30μg的加快器偏置),而大都SINS只能抵达导航级(0.01°/时的陀螺仪偏置,50μg的加快器偏置)或战术级(10°/时的陀螺仪偏置,1mg的加快器偏置)。关于大大都服务机器人或AGV导航运用,这一精度足够了。
导航办法许多,包含机器视觉、GPS、UWB、SLAM型激光雷达等。根据IMU的惯性导航始终是导航的重要组成部分。可是,由于这种传感器的约束——例如偏置差错、轴间差错、噪声,特别是零偏不安稳性——惯性导航一般需求选用一个同伴传感器,定时为它供给参阅或校准,本文将这种状况称为传感器交融。许多传感器都能够与IMU交融,例如摄像头和里程表,但在这些传感器中,地磁传感器是一种低本钱的计划,可与IMU合作取得姿势信息。
在本文中,咱们运用ADI的IMU ADIS16470和地磁传感器来开发渠道和算法,完成捷联惯性导航体系。可是,地磁传感器只能供给姿势信息。关于航位核算或间隔丈量,咱们只能运用IMU中的加快度传感器。
ADIS16470 IMU简介
ADI公司的ADIS16470是一款微型MEMS IMU,集成了3轴陀螺仪和3轴加快度计。其陀螺仪零偏安稳性为8°/时,加快计零偏安稳性为13μg 其要害参数都经过出厂校准。此外,ADIS16470的低价格在同级产品中具有吸引力,得到了许多客户的广泛运用。在本文中,咱们运用微控制器与ADIS16470经过SPI接口进行通讯。
地磁传感器介绍
地磁传感器是用于丈量罗盘体坐标(即坐标系)中的地磁场的传感器,可为航向供给肯定参阅。其x、y和z重量值由本地地磁场投影而来。这种传感器有两个首要缺陷——一是精度和分辨率不高——例如,常用的霍尼韦尔罗盘传感器HMC5883L的分辨率仅为12位。另一个缺陷是传感器简单遭到周围环境的搅扰,由于地磁场十分弱,强度规模为毫高斯到8高斯。
虽然有这些缺陷,依然能够在许多状况下运用,例如野外、低EMI环境等。将地磁传感器与IMU进行松耦合,就能够在大大都环境中运用这类传感器。
在本文中,咱们运用PNI传感器公司的高性能电子罗盘传感器RM3100,它供给了24位分辨率。PNI运用自动鼓励法来进步抗噪声才能。
罗盘传感器的校准
在运用罗盘传感器之前,需求对其进行校准以消除两个首要差错。一个是失调差错,这原本是由传感器和电路的失调差错引起的。另一个是标度差错。这两种差错都简单遭到周围磁环境的搅扰。例如,如果有一个x轴向的外部磁场施加到传感器上,就会给出外部x轴失调差错。一起,x轴标度也将与y轴和z轴不同。
一般用于校准磁传感器的办法是在xy平面上滚动传感器绕圈,然后抽取数据。一个地点的地磁场强度是一个常数值,因而制作的数据应该是一个圆;可是,事实上,咱们将看到一个椭圆形,这意味着咱们需求移动椭圆并从头缩放到以零为中心的圆。
上述2D校准办法有一些缺陷,而且需求用加快器来丈量其倾斜度。咱们运用3D球面拟合办法来校准罗盘传感器。首要,咱们需求将传感器旋转到x-y-z空间中的每个方向,并在3D坐标中制作其值。然后咱们需求运用最小平方差错(MSE)办法将数据拟合为椭球面。
椭球方程能够表明为

其间,X、Y和Z是罗盘输出在三个方向上的地磁重量。将这些值拟合为椭球面意味着,咱们需求得到一组最优系数解。咱们将系数界说为:
在拟合时,咱们界说向量:

所以咱们需求核算最优σ,并运用公式2来找出最小值:

这样咱们就能够得到图1所示的拟合成果。






