


SPCE061A 是一款16位独具语音特征的操控器, 片内选用的nSPTM ( microcontro ller and signal processor) 中心处理器, 具有较高的处理速度, 能够完结16位算术逻辑运算、16 × 16位硬件乘法运算和DSP内积滤波运算, 能够快速处理杂乱的数字信号, 不需要额定的专用语音操控芯片, 就能完成语音的编解码等, 既节省了规划本钱, 又能满意必定的操控要求。操控器选用模块化架构, 集成了ICE(在线仿真)、锁相环振荡器、时基操控器、7通道10位AD转换器、单通道AD+ AGC(自动增益)转换器、双通道10位DA转换器、通用异步通讯接口、串行输入输出接口、电压监控等模块。
语音输入电路规划
小车的语音输入电路如图2所示。其间, VM IC 供给传声器的电源, VSS是体系的模仿地, VCM 为参阅电压, 1脚和2脚别离是传声器X1 的正极、负极的输入引脚。当对着传声器说话时, 1脚和2 脚将跟着传声器输入的声响发生改变的波形, 并在SPCE061A 的两个端口处构成两路反相的波形, 送到SPCE061A 操控器内部的运算扩大器进行音频扩大, 经过扩大的音频信号, 经过ADC转化器转化为数字量, 保存到相应的寄存器中, 然后对这些数字音频信号进行紧缩、辨识、播映等处理。
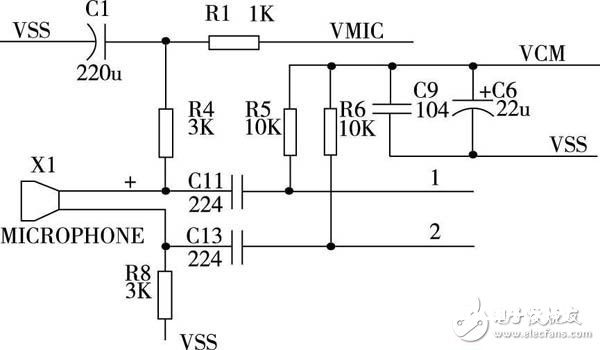
图2 语音输入电路
语音输出电路规划
小车的语音输入电路如图3所示。其间, VDDH 为参阅电压, VSS是体系的模仿地。音频信号由SPCE061A 的DAC引脚输出送到电路的9端, 经过音量电位器R9的调理端送到集成音频功率扩大器SPY0030, 经音频扩大后, 音频信号从SPY0030输出经J2端口外接扬声器播映声响。
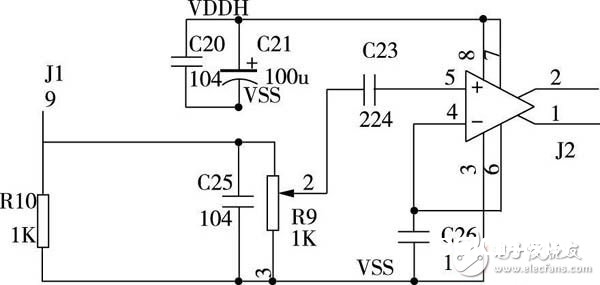
图3 语音输出电路
光电检测电路规划
小车的光电检测电路选用E18-D80NK类型的光电传感器, 它集发射和承受于一体, 红外发射管向某一方向发射红外线, 遇到障碍物后红外线被反射由接收管承受, 然后判别出小车的前方是否有障碍物, 对障碍物的感应间隔能够依据要求经过传感器上的微调旋钮进行调理。传感器前端增加了透镜, 运用聚集效果远间隔勘探物体。传感器内部集成了扩大、比较、调制电路, 使传感器受可见光的影响较小, 光电检测电路的衔接图如图4所示。
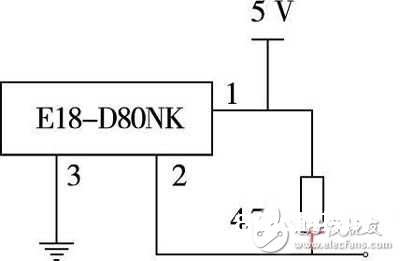
图4 光电检测电路
驱动电路规划
小车的驱动电路是一个全桥驱动电路, Q1,Q2, Q3, Q4四个三极管组成4个桥臂, Q5 操控Q2和Q3的导通和关断, Q6操控Q1 和Q4 的导通和关断, 驱动电路别离用于后轮动力驱动电路和前轮方向驱动电路。当1管脚为高电平, 2管脚为低电平不时Q1 和Q4 导通, Q2和Q3截止, 电动机带动车轮工作; 当1管脚为低电平, 2管脚为高电平不时Q1和Q4截止, Q2和Q3导通, 电动机带动车轮反向工作。
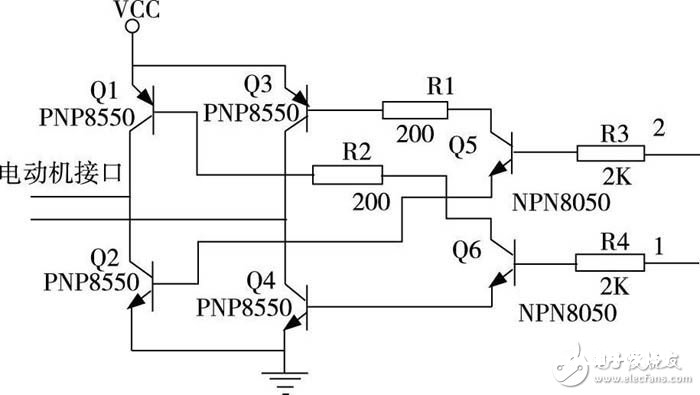
图5 驱动电路
将语音输入电路的1, 2 端口别离衔接到SPCE061A操控器的M ICP, N %&&&&&%N 管脚上; 将语音输出电路的9端口衔接SPCE061A的DAC1管脚; 后轮动力驱动电路的1, 2端衔接到SPCE061A的IOB8, IOB9管脚, 前轮方向驱动电路的1, 2端衔接到SPCE061A 的IOB10, IOB11管脚; 光电检测电路的OUT 端衔接SPCE061A 的IOB12 管脚, 智能小车的全体衔接如图6所示。
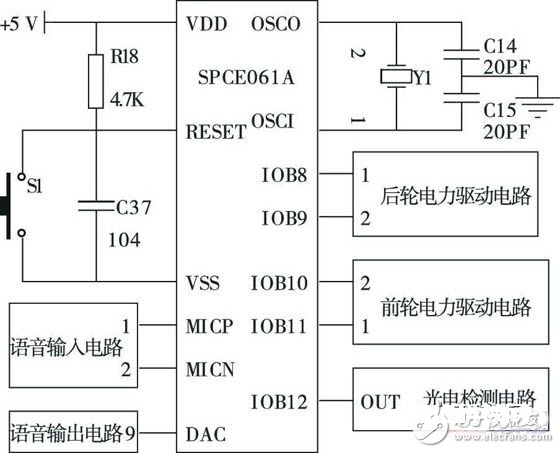
图6 智能小车全体衔接图
介绍了一种根据SPCE061A 的智能音控小车机器人的规划进程, 给出了智能小车的硬件构成。从软件规划的视点论述了小车运用语音辨识和中止技能的智能操控算法, 并具体说明晰语音辨识技能在智能小车上的完成进程。试验标明智能小车运作杰出。






