


现在轿车车载网络方式多种多样,现在使用广泛的是操控器局域网络,即所谓的CAN Bus总线体系。1986 年德国博世公司开发出面向轿车的CAN 通信协议。尔后,CAN 经过ISO11898 及ISO11519 进行了标准化。CAN网络总本具有高保密性;有用支撑分布式操控;实时操控的串行数据通信总线;传输速率高达500Kbit/S–1Mbit/S;满意发动机操控单元、变速器操控单元、ABS/ESP操控单元、安全气囊操控单元等对信息传输的实时性要求较高的操控体系;
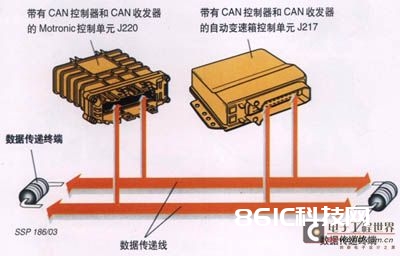
由发动机操控单元和变速器单元组成的CAN总线示意图
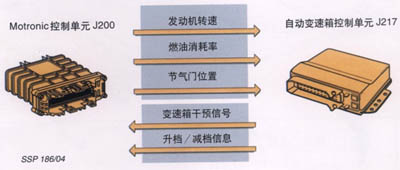

发动机操控单元与变速器操控单元经过CAN总线传递的数据内容
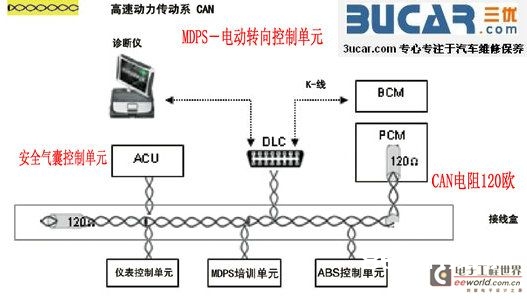
现代瑞纳CAN总线结构图
CAN体系又分为高速和低速,高速CAN体系用于满意发动机操控单元、变速器操控单元、ABS/ESP操控单元、安全气囊操控单元等对信息传输的实时性要求较高的操控体系;
低速CAN体系是舒适型,速度:125Kbps,首要操控外表、防盗等。
CAN BUS数据总线传递数据内容:
CAN数据总线简直一刻不断的,依照固定的通信协议,在操控单元之间进行数据传输。依照数据协议的要求,CAM总线上传输的数据最小单位为一个数据区域,开端域、状况域、查看域、数据域、安全域、承认域和停止域组成。
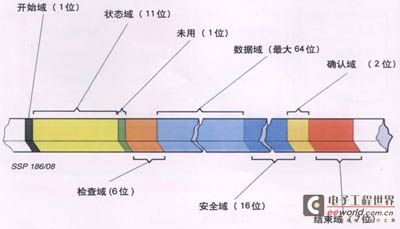
CAN数据总线传输数据的数据结构
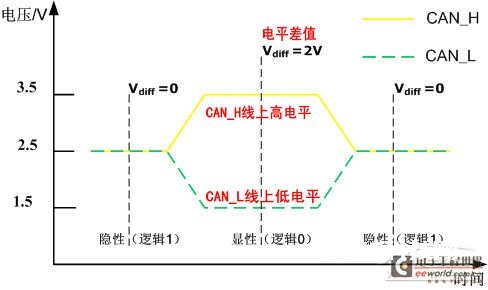
CAN BUS数据总线双绞线结构:
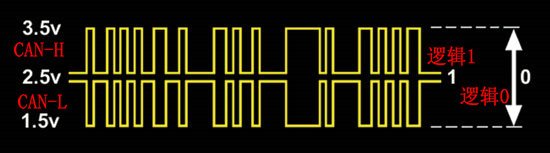
荣威350CAN数据总线信号波形图
数据总线信号波形图






