


步进电机具有快速启停,精确度高级特色,由于步进电机在速度和方位上的操控优势,使得由步进电机操控的切开机床等出产机床能够愈加精确和快捷的完结任务,本课题运用单片机操控步进电动机加减速,也便是改动脉冲的时刻间隔,经过单片机然后操控步进电机,能够有软件和硬件两种办法:软件是经过改动程序的办法然后改动输出脉冲的频率,可是这种办法在电动机操控中要不停地发生操控脉冲占用了很多的CPU 时刻,使单片机无法一起进行其他作业 ;硬件办法是运用操控器的内部的守时器来完结的,在进入守时中断后改动守时常数,然后升速时使脉冲频率逐步增大,减速时使脉冲频率逐步减小,这种办法占用CPU时刻较少,是现在咱们运用较多的调速办法。
1 切开体系硬件组成
整个模型体系框图如图1 所示。
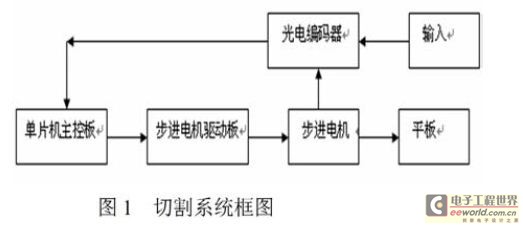
切开操控体系结构框图如图1 所示,是由光电编码器模块、单片机操控模块、步进电机驱动模块、伺服机构和自在摆本体等几大部分构成的一个体系。在整个体系中,经过光电编码传感器的反应取得结尾被控机械的角位移,操控驱动模块实时读取光电编码器反应的数据,然后确认操控办法(电机怎么滚动、滚动速度、加快度等),一起操控模块经过处理器内部的操控算法完结该操控决议计划,发生相应的操控信息,使电机滚动,完结要处理的被操控目标的运动。
1.1 单片机操控体系
本体系规划中选用89C51 单片机作为处理器,89C51 单片机把组成核算机的各种功用部件:中央处理器CPU、I/O 接口电路、RAM、ROM、守时器/ 计数器以及串行通讯接口等部件组成,并将这些部件都集成在一个芯片内,构成一个完好的微型核算机。单片机是整个体系的中心,首要用于处理光电编码器收集和传输回来的数据,它经过处理器内部的操控算法把光电编码器反应回来的信息用于操控步进电机的转速与转向。
1.2 步进电机随动体系
关于步进电机来说,假如要取得较快的加减速进程,即要求在每一个频率对应输出最大转矩。经过电机频矩特性曲线能够得到每个频率下的最大输出力矩。在起动进程中,由于受最大输出力矩的约束,因而会影响起动间隔和起动时刻。由于本运动平面规模很小,一起求勘探点以必定的初速度作曲线运动,对x 轴方向负载电动机的起动提出了要求:在到达设定的初始速度时,要求起动间隔尽或许短。因而选用传统的发动办法,达不到本课题的意图,在本课题中,选用了一种新式的发动办法。
1.3 传感器模块
规划中挑选光电编码器作为传感器模块,它是一种将输出轴上的机械几许位移量经过光电转化转化成数字量或脉冲的一种传感器。这是现在丈量角位移使用最广泛的一种传感器,光电编码器是由光电检测设备和光栅盘组成的一种传感器。光栅盘是在给定直径的圆盘上均匀地注册若干个长方形孔。由于光电码盘与电动机同轴,当电动机运动时,光栅盘与电动机坚持同步滚动,经检测设备检测输出若干脉冲信号,经过核算每秒光电编码器输出脉冲的个数就能反映当时电动机的转速。那么,光电编码器就能够十分精准的丈量出自在摆的摆角,再由单片机实时操控电机转速,然后到达随时精准的操控作用。
2 步进电机操控软件规划
关于步进电机的速度操控体系,从起点到结尾的工作速度是有必定要求的。假如要工作的速度没有超越步进电机的极限起动频率,那么电机能够按要求直接起动,工作至设定点后可经过中止脉冲串操控电机中止。但在通常状况下,当要求的步进电机工作速度比较高时,而电机的极限发动频率又比较低,这时体系在开端发动时即以工作速度直接发动,由于该发动速度超越极限发动频率然后使步进电机不能正常发动,然后会发生失步,乃至是不能发动的状况。整个体系工作时,假如到达设定点时当即操控中止发生脉冲串,令步进电机当即中止,由于体系惯性,使得步进电机不能够当即中止,然后会发生一种过冲现象。因而,要对步进电机在工作的进程中和发动时选用加快和减速进程,即选用升频发动和降频中止技能。
当发动步进电机时,要使步进电机逐步到达安稳的作业频率,当中止步进电机时,使步进电机的工作频率逐步减低直至中止。但假如升降频率比较缓慢,步进电机尽管不能呈现过冲和失步的现象,但却下降了整个体系的作业效率。因而,对步进电机的频率操控有2 个基本要求:榜首、要给出电机固定的总步数,第二是要尽量减短走步的总时刻。为了到达以上二个要求,在软件编译方面要做很多的作业。为了确认电机固定的总步数,要设置一种能随时查验总步数是否到达给定值的办法,电动机每换相一次,都要校核一次。在步进电机工作前,可将给定的总步数存放在RAM 区的某些单元中,电动机发动后,软件按换相次数递减这些存储单元中的数值,一起检测单元中的数值直至该数值为零,此刻阐明电机已走完预先给定的总步数,应中止脉冲发生,中止电机工作。
能够经过软件来完结对步进电机加减速的操控,分为加快阶段、匀速阶段、减速阶段三个阶段。选用微处理器对步进电机进行加减速操控实践上便是改动输出脉冲的频率,升速时脉冲频率逐步加快,减速时脉冲频率逐步变慢。较为抱负的发动曲线应是按指数规则发动,但实践使用中常常选用按直线拟合的办法,即选用恒加快算法,易操作,作用较好。
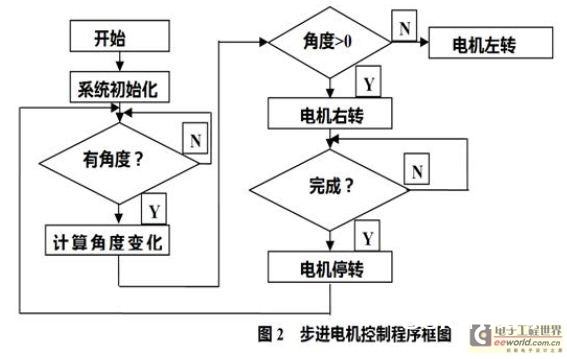
本规划选用的是对步距角进行8 细分。每宣布一个脉冲,电机走一步,转过的视点为1.8° /8,即0.225°,电机转一圈需求1600 个脉冲。步进电机的方向由ARM 的一个IO 口操控,而且运用两个发光二极管来表明其正回转。电机方向操控分3 种办法:左转、右转和自锁。当误差≤ 0.003,即视点改变不到0.225°,步进不到一步时,操控步进电机处于自锁状况;当误差>0.003 时,电机右转;当误差<0.003 时,电机左转。
操控程序流程图如下图2所示:
3 测验成果剖析
步进电机失步是一个常见的问题。试验中电机在三种状况下简单呈现失步的问题。一是起步阶段,二是高速工作阶段,三是负载发生改变的时分。
电机在发动进程中为避免失步和堵转,脉冲频率有个不断增大的进程,该进程一般需求200~400ms 的时刻,期间较易呈现失步现象,必定要确保极限发动频率不小于呼应频率最大值,也即频率改变进程中的最大频率必定要小于或等于极限频率。因而,能够在编译的程序中预先设置一个上限频率,使得电机的最大频率一直小于或等于该频率,确保电机发动进程中削减呈现失步的或许。
当步进电机在最高速或许挨近最高速工作的时分,也会简单呈现失步的现象。而这一现象的发生最常见的原因是电源的电压下降然后导致的,由于摆杆的最大运动进程中的视点为60 度,步进电机最大滚动步数小于300,所以可适当下降电机的工作速度。
试验进程中选用电机的最大工作频率为2KHz,设置匀速工作的频率为1KHz.
当结尾负载有改变的时分,电机输出的转矩也会知道,然后使电机工作阻力发生改变,或许会呈现失步现象。咱们能够运用进一步将驱动细分的办法,削减因负载呈现改变而引起的失步现象,本课题中选用8细分的办法。






