


跟着数字化技能的快速开展,数字操控技能在工业操控方面得到了极端广泛的运用。由步进电动机组成的操控体系具有结构简略、功能强大、本钱低价等许多长处,能满意工业操控的根本性能需求和大规模商用要求,因而在工业自动化设备等范畴得到了广泛而深化的运用。步进电动机是一种将电脉冲信号转变成对应角位移或线位移的电动机,实际上是一个D/A转换器,也便是一个数字/视点转换器。步进电机的角位移与操控脉冲间完成准确同步,若将步进电机的角位移的改动转换为线位移、方位、体积、流量等物理量的改动,便可完成对它们的操控。步进电动机是数字操控电动机,能将脉冲信号转换成角位移,电动机的转速、中止的方位取决于脉冲信号的频率和脉冲数,而不受负载改动的影响,在非超载状况下,依据上述线性关系,再加上步进电动机只要周期性差错而无累积差错,因而步进电机适用于单片机操控。因为步进电动机具有快速启停,可直接接纳计算机输出的数字信号以及精度高级显著特点,因而,步进电机现已成为工业进程操控中的重要操控元件之一。
因为单片机技能的老练开展和本钱优势,使得运用单片机操控的步进电动机体系具有本钱低价、运用灵敏等长处,可以广泛运用在数控机床、机器人,工业自动操控以及各种可控的有定位要求的机械东西等运用范畴中。
1 步进电动机作业原理
步进电动机按其相位数不同,可以分为二相、三相、四相、五相和六相。本文以三相为例来阐明步进电动机的作业原理。电动机的定子上有6个等分的磁极,A——A’、B——B’、C——C’,相对的两个磁极组成一组,每个磁极上都有5个均匀分布的小齿轮。转子上由40个小齿轮均匀分布在圆周上,相邻两齿轮之间的夹角为3600/40=90。当电流经过某一绕组时,该绕组对应的两个磁极即可构成N——S极,并产生磁场,写转子构成磁路。若定子的小齿轮此刻与转子的小齿轮没有对齐,则在该磁场的效果下,转子就会进行必定视点的旋转,使转子的小齿轮与定子的小齿轮进行对齐,挑选的视点即为步距角。
在单三拍操控方法下,当A相通电,B、C相断电时,在磁场效果下,使转子小齿轮与A相的定子小齿轮对齐。若假定与A相中心对齐的为0号齿轮,A相地点视点为00。因为三相磁极相差1200,此刻转子13号齿轮与B相的中心相差视点为1 200-90*13=30,转子27号齿轮与C相的中心相差视点为2 400—90*27=-30,若此刻让B相通电,A、C相断电,在磁场效果下,要使转子小齿轮与B相定子齿轮对齐,转子需顺时针旋转30。若此刻让C相通电,A、B相断电,在磁场效果下,要使转子小齿轮与C相定子齿轮对齐,转子需逆时针旋转30。若通电次序为:A——B——C——A,转子则顺时针旋转,若通电次序为:A——C——B——A,转子则逆时针旋转,然后完成对电机的正回转操控。
2 操控体系规划
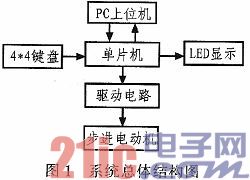
步进电机操控体系主要由单片机、PC上位机、驱动电路、步进电动机、4*4键盘和LED显现等模块组成,下图1为步进电机操控体系是整体结构图。单片机产生脉冲信号并将脉冲信号传送给步进电动机,完成对步进电动机的步数和圈数的准确计数,然后完成对步进电动机的转速操控。PC上位机模块是体系的中心,经过串口向单片机发送操控指令,完成PC机对步进电动机的实时操控,并实时显现步进电动机的运转状况。4*4键盘模块完成指令输入,LED显现模块可显现步进电动机的转速和转向等运转状况。为维护单片机操控体系硬件电路,在单片机和步进电机之间增加过驱动电路。
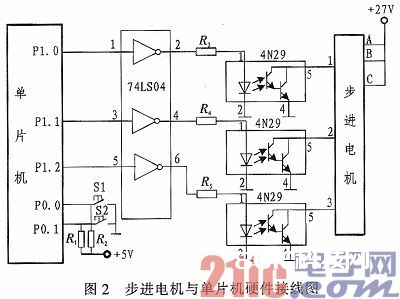
因为步进电动机的驱动电流比较大,步进电动机较大驱动电流的通断会形成电磁搅扰,进而会影响单片机的正常作业。因而单片机与步进电动机之间的驱动电路就显得尤为重要。本体系选用74LS04非门与有光电阻隔的4N29达林顿管组成驱动电路,这样不只避免了在驱动电路产生毛病,形成高电压、大电流进入单片机而焚毁器材。一起割断了驱动电路与单片机操控电路之间的电气衔接。别的步进电动机的启停和正回转分别由S1,S2操控。硬件接线图如图2所示。
3 软件完成
单片机程序判别步进电机是否发动;若发动则进一步判别其旋转方向;然后依照既定的旋转方向传送操控脉冲序列,再加上脉宽延时即可。每走一步步数减1,并判别步数是否为零,然后决议是否送下一个脉冲序列。其操控状况如表1所示。
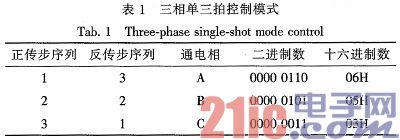
由表1可以看出,输出的不同状况字,表明不同的励磁方法。P1=0x06H,表明A相通电,其它两相断电:P1=0x05H,表明B相通电,其它两相断电;P1=0x03H,表明C相通电,其它两相断电。若以次给P1口送0X06H,0X05H,0X03H,则步进电机通电次序为A——B——C——A相。反之若以次给P1口送0X03H,0X05H,0X06H,则步进电机通电次序为C——B——A——C相。然后用软件完成了步进电机的正回转操控。步进电机的旋转速度可以用脉冲宽度,即送出操控状况字后的延时时刻长短来操控。
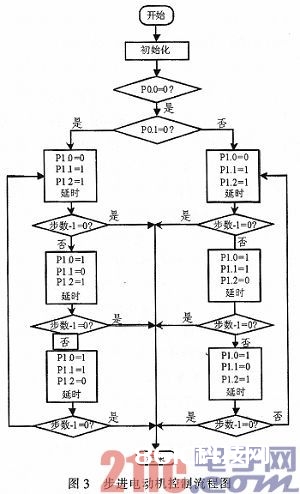
软件规划流程框图如图3所示。
4 结束语
本体系经过89C51单片机操控步进电动机,操作便利、可靠性高,步进电动机的步距角十分准确,且不受外界环境温度,湿度等要素的影响。本体系只需要简略的改动输出状况字序列,及状况字的输出频率,便可完成对步进电机的精度及速度操控。由PC上位机程序可以彻底操控步进电动机的各种运转方法,使体系可以运用于恶劣环境中,确保运用人员的安全,且适用范围较广,该体系在数控铣床进给伺服机构的驱动电动机进行试用,实用价值较高,因而本体系具有很好的运用远景。






