


1 导言
空气压缩机作为气动操控体系的气源设备,其在作业进程中的安稳程度和可靠性直接关系到出产安全性。因为前期的电气操控多为继电器线路,长时刻作业简单老化,从而使灵敏度下降,在作业进程中会经常呈现停机毛病,给正常出产形成影响。选用可编程操控器技术改造空气压缩机的操控,克服了传统的纯继电器操控电路的缺乏,不只能够完结对开关量操控,还能完结对模拟量进行操控。满意了体系对操控准确性和安全性的要求。
2 体系作业进程
2.1 空气压缩机组的作业进程
在设备上电开机后,体系首要对空缩机的作业条件进行查看,当冷却水压力、空压机曲轴箱油压满意要求时,1#机发动,2#机作为备用,其发动方法均选用y-δ起动方法,y-δ起动延时为6秒。起动后,储气罐开端充气,在储气罐压力到达设定值0.7mpa时空缩机进气阀封闭,机器空作业。当储气罐压力下降到0.65mpa时,进气阀翻开,再次进行充气。因为毛病等原因使储气罐压力降到设定值0.55mpa时,且1#机处于停机状况,则2#机起动并正常作业,其作业原理同1#机相同,持续对储气罐充气。在储气罐压力降到0.55mpa时,且2#机处于停机状况,1#机起动并正常作业。与此一起,两台机器的正常作业时刻均为12小时,也就是说,一台机器作业到12小不时,不管其有无毛病,或是储气罐压力是否低于0.55mpa,均要停机并发动另一台机器。
2.2 气体枯燥设备的作业原理
两台压缩机共用一台气体枯燥设备。无热气体枯燥器,开机后,a塔先做吸附作业,b塔做再生作业。在设定的时序操控下,进气电磁阀a2翻开a1、b1、b2均封闭,压缩空气经a2阀,从底部进入a塔,在向上运送进程中,气体中的水分被塔内吸附剂吸掉,枯燥的气体通过梭阀c进入储气缺罐,与此一起,在a2翻开后,经延时10秒b1翻开,用b塔中的剩下气体从上到下运动,将吸附剂中的小分从b1阀带出,经消声器排空。其敞开的10秒时刻是进行b塔脱附作业。在a2翻开后延时十分钟后b2电磁阀翻开,一起a2阀封闭,b塔进行充气,十秒后,a1阀翻开,a塔中剩下气体从上至下经a1阀,从d消声器排出,并将a塔中水分带出,使a塔脱附,经延时十秒a1阀封闭。此刻,因为a塔中的压力下降,b塔中的压力上长,梭阀c将a排气口封闭,将b排气口翻开。同理,在b2阀敞开十分钟后,a2阀翻开,b2阀封闭,延时十秒,b1阀翻开,使b塔进行脱附作业。就这样两塔替换作业,进行对气体的枯燥。

图1 空气压缩机组作业原理
3 体系的操控要求
3.1 空气压缩机的操控要求
(1) 开机前按通电源,一切安装在中控室和现场的状况指示灯点亮,显现当时状况。
(2) 按下起动按钮,空压机按y-δ方法起动,进气口电磁阀翻开,开端给储气罐充气。别的,在起动时,不要求两台机器一起作业,但可选恣意一台先作业。
(3) 正在作业的机器,作业时刻超越12小时或毛病,备用机起动,并作业。
(4) 在作业进程中,假如发生水压、油压缺乏,马上停机,并宣布指示。
(5) 按下中止按钮,停机。
3.2 气体枯燥器的操控要
气体枯燥器的操控与空压机的作业同步,与空压机的电源一起翻开,其起动受空压机的主接触器的操控。
4 体系硬件规划
4.1 体系配置
本规划所选用的是西门子300CPU,I/O口选用OYES-SM321和OYES-SM322数字量输入/输出模块及OYES-SM331模拟量输入模块在其三号扩展槽的第二个SM口上顺次进行扩展。
4.2 扩展单元I/O分配及接线
对奥越信300PLC的扩展口进行分配,其接I/O口界说如附表所示。
开关量信号的收集,空压机在高速作业时,必须有很好的冷却体系和光滑体系,以防止作业进程中发生的热量对机器形成损坏。所以水压、油压是首要要考虑的,选用压力开关进行这些量的收集,并衔接到其数字量输入模块sm321上,开端地址为100.0-100.3。模拟量的收集主要是用于测验储气罐的压力,以操控空压机作业。这些量需要用压力变送器进行收集,并将0-1mpa的压力转换成4-20ma的电流信号送到模拟量输入模块SM331上,其开端地址为672-687。其硬件接线如图2所示。
关于空压机的y-δ起动,虽然在软件程序规划中现已对其进行km2和km3、km5和km6的互锁,但为了其作业的安全性,所以在硬件衔接中再一次对其进行互锁,确保起动时因为触点烧蚀或其它毛病形成不能断开而发生短路状况。气体枯燥器部分有四个电磁阀,这四个阀的在电源接通后,由km1和km4进行操控,不管是1#机仍是2#一旦起动,气体枯燥器就开端作业,其a塔下面的a2阀翻开,a塔先行作业。然后按前述的作业原理进行作业。用km1和km2操控这一部分能确保气体枯燥器与空压机的同步作业。
5 软件规划
5.1 空压机操控
根据空压机的作业原理规划其作业程序。开机,查看其水压、油压,在这些条件满意时1#机起动,并开端正常作业。在此要注意的是,在运动中2#机的起动,因为它一方面要遭到定时器的操控,还要遭到储气罐的压力操控,当储气罐的压力低于0.55mpa时,这说明1#机毛病,所以2#机起动,可是这与1#机的初始条件相同,在开机时,储气罐的压力为0,两台机器都能够作业,因而在这里要求通过压力变送器和km1、km4一起对开机进行操控。km1、km4别离与压力变送器串接进行对两台机器的互锁作业操控。其主机和备用机的作业梯形图如图3所示,通过i672与q108.3操控1#机起动,i672与q108.0操控2#机的起动。这样就使得,当压力低于设定值0.55mpa时,两台机器不至于一起起动。
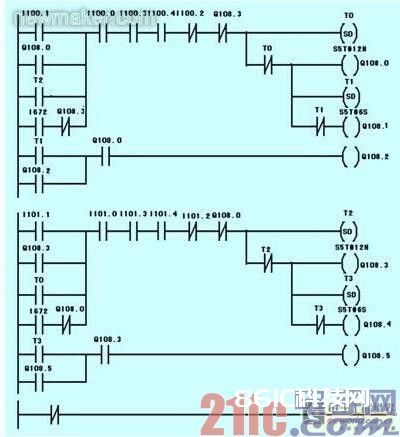
图3 空压机梯形图
5.2 气体枯燥器体系操控
空压机气体枯燥器体系的梯形图对气体枯燥器的操控,主要根据两台空压机的起动状况而定。作为共用部分,不管那一台机器起动都要求气体枯燥作业,因而,在气体枯燥的梯形图中不用规划起、停按钮,而是通过q108.0和q108.3即1#、2#机的km1、km4来完结其操控。
6 结束语
本次改造后,在空压机在作业进程中,减少了操作人员到现场的巡回次数,能够通过在中控室直接调查空压机的作业状况,对现场呈现的异常状况宣布的报警信号,可做出快速反应,而不是像曾经那样,比及其它气动操控的设备呈现气压缺乏报警时才发现空压机体系有问题。通过这一年多的作业,除了设备的机械毛病外,基本上没有呈现操控上面的问题,完全符合规划要求。选用奥越信PLC其性价比高并且对空压机的操控,使其操作简洁,并且在作业进程中的安全性和安稳性也进一步得到进步。






