


跟着定位导航技能的飞速开展,车载导航体系在相关范畴得到了越来越广泛的运用。车载导航体系的功用是协助用户确认车辆方位并供给正确的操作指示,因而定位的准确程度成为衡量一套体系功用好坏的重要目标。现在,跟着城市道路的开展,高架路日益成为城市交通的纽带,因而怎么对车辆是否坐落高架上的定位成为了车载导航体系急需解决的问题。常用的GPS 卫星定位尽管能够丈量高度,可是差错却在100m左右,无法抵达高架一般几米的要求,所以直接丈量的办法是很难满意的。
这儿运用国外老练的加速度计器材ADXL 202JE,经过丈量车辆上下高架时的倾斜角改变,结合GPS定位来判别车辆是否坐落高架上。
体系规划
丈量原理
ADXL 202JE选用先进的MEMS技能,在同一硅片中刻蚀了一个多晶硅外表微机械传感器,并集成了一套精细的信号处理电路,如图1 所示。
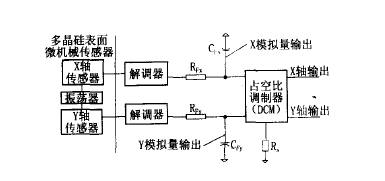
图1 ADXL 202 功用结构框图
传感器首要是由一个运用外表微机械加工的多晶硅组织和一个差动电容器组成。在加速度的作用下,多晶硅结构会发生偏移使电容值发生改变。在信号处理电路中(如图1) ,差动电容器的改变信号由解调器解调后经过一个RC 滤波器(由内部RFy,RFy和外部CFy,CFy构成) 送到占空比调制器中,由调制器转换为占空比与加速度成正比的方波,方波的周期(T2) 能够经过RS 确认。这个方波能够直接送到单片机进行处理,经过运用计数器丈量方波周期T2 以及脉冲的宽度T1 (如图2) ,然后得到加速度的值。
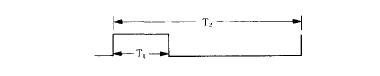
图2 ADXL 202JE 输出波形示意图
加速度: a= (T1/T2- u0g)/u1g式中:T2 由占外接电阻器RS 确认,其关系为T2= RS/125兆欧; u0g为0g 对应的占空比,其典型值是50%; u1g表明1g 加速度改变引起的占空比改变值,关于ADXL 202JE,1g的典型值是12.5%。
硬件规划
如图3,体系首要包含三个部分。

图3 丈量电路原理框图
(1) 丈量部分电路首要由ADXL 202JE构成,并辅佐以一些滤涉及调理电路;
(2) 体系控制电路部分首要由AT89C52单片机以及MAX232构成,由单片机处理占空比调制信号,MAX232芯片完成串口通讯;
(3)GPS模块选用摩托罗拉的GT型Oncore接收器。
软件规划
单片机选用中止触发的办法来丈量传感器输出脉冲周期,然后核算当时体系的倾斜角,并结合GPS模块判别车辆是否上高架,首要流程框图如图4 所示。
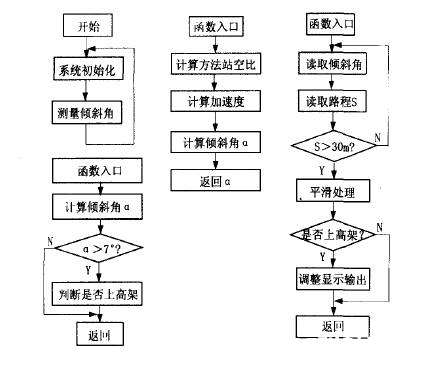
图4 程序流程图
定论与评论
丈量动态加速度的带宽挑选
ADXL 202JE带宽式中:
占空比调制器周期的确认
关于ADXL 202JE,当DCM输出方波频率大于模仿带宽10倍以上,丈量准确度就很抱负,因而周期越小越好。可是周期的减小对微控制器的处理速度要求会进步,而实践中硬件的处理速度是遭到器材功用约束的。归纳以上要素,方波的周期是依据模仿带宽、处理器速度以及丈量分辨力的要求一起确认的。
试验剖析
依据实践的精度要求,试验选用1uF 的滤波电容,这样带宽为5Hz,噪声约为0.43mg。Rs阻值为1M,这样输出方波周期约为141Hz。选用12M晶振的单片机,这样占空比的精度可抵达0.14%。在实践车载试验中,经过滤波和滑润处理,并经过重复调试根本完成了规划意图(图5 是实践测得的数据)。

图5 车辆上下高架时倾斜角丈量曲线
定论
运用上述的规划办法及其关键,根本完成了对车辆定位的要求,抵达了预期作用。实践证明ADXL 202JE十分适合于频率改变较为缓慢、加速度不太大的丈量。在充分考虑各种要素基础上,合理规划有关参数,就能够得到很好的准确度。






