


为完结恶劣环境下视点值的丈量,剖析了各类视点传感器的优缺陷,本文介绍了一款依据MLX90316的非触摸式、低本钱、高分辨率,高抗搅扰的磁性视点传感器的规划计划。
本计划中所规划的整个体系要点剖析了信号收集模块的完结原理和影响丈量精度的机械结构,经过微处理器完结视点值的解算,在此基础上编写软件算法。试验证明本计划所规划的视点传感器的精度能到达0.5°,可广泛运用于轿车、电机等工业范畴中,满意所要求的技能指标。
1.导言
视点传感器广泛应用于轿车、机械、航空、航天、帆海、工业自动化等范畴。它首要分为触摸式和非触摸式两种,因为触摸式的视点传感器跟着使用时间的增加,会存在机械磨损、精度下降、常常修理乃至替换新设备等缺陷,这不只提高了生产本钱还简略使被测设备的质量没确保,而非触摸式视点传感器则克服了这些缺陷。常用的非触摸式视点传感器有光电式和磁电式的。光电式的尽管精度比磁电式的高,但对环境要求严苛、抗震性也较差,因而也就不适用于环境较杂乱的工业场所。正是依据这些问题,规划一种依据磁电式的视点传感器,它具有本钱低价,抗搅扰性高,分辨力在0.5°以内等长处。
2.体系总体规划原理
整个体系有四部分组成,分别为电源模块,磁传感器信号收集模块、微处理器模块、信号输出模块,硬件框图如图1所示。
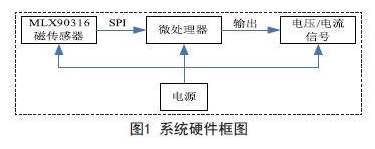
磁传感器信号收集模块首要经过集成有双轴霍尔元件的集成芯片感知视点的改变,并以模仿信号或数字信号方法输出到微处理器中,经过必定的编码和解码,由微处理器输出工业用的电压或电流信号,或许以串口通讯方法输出数字信号。为了减小体系的杂乱度和差错来历,信号收集单元挑选Melexis公司的MLX90316芯片。它归于CMOS霍尔传感器,能够输出与芯片外表平行的磁场相对应的视点方位信息,并以SPI的串行通讯方法输出数字信号,省去了A/D转化电路,这极大的减小了体系规划的杂乱度。微处理模块选用Freescale公司的MC9S08DZ60,它是一款小体积、低本钱、低功耗和较多外部接口的16位微处理器。
它具有24路12位的A/D通道、控制器区域网络(MSCAN)、串行外围设备接口模块(SPI)、串行通讯接口(SCI/USART)、内部集成电路总线(IIC)等外设数字接口,很合适与外界进行数字信号通讯。
3.机械结构规划
视点传感器的机械结构首要有三部分组成,分别为旋转轴、磁铁和检测电路。其结构如图2所示。
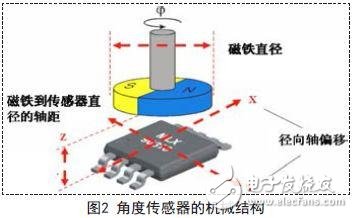
旋转轴、磁铁和传感器方位的机械差错将决议体系丈量的精确度。比较于抱负的Sine和Cosine输出曲线,机械差错能够导致附加的电压偏移、相位偏移、起伏改变以及非线性差错等。
磁铁到传感器轴距的下限由饱满效应(电气或磁场)所决议,上限由信噪比、信号与偏移电压的份额来决议。
因为旋转轴在运动进程中发生的机械磨损以及轰动发生的轴偏移方位都将导致视点输出信号的非线性,图3提醒了磁铁轴心的非线性度导致的视点差错。
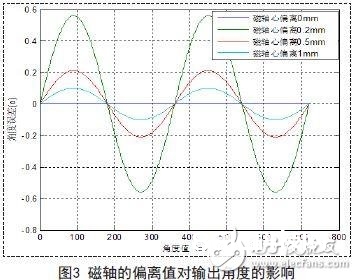
由图3可知磁铁的轴心违背的越大,终究输出的视点差错越大,因而要确保输出视点的精度,所选取的磁体的轴心的违背度应满意必定的同心度。
4.硬件电路规划
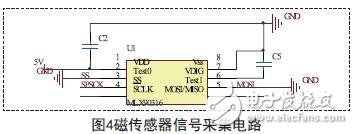
硬件电路的中心是磁传感器信号收集模块,它首要是使用磁传感器芯片MLX90316来完结的,它能够把磁场的改变转化为视点信息。信号收集电路如图4所示。
MLX90316芯片是集成了Tria度isTM型的CMOS霍尔传感器,当外加磁场的重量与芯片外表平行时则可输出两路正交磁场信息,依据这一特色能够取得对应的视点方位信息,它的内部结构如图5所示。
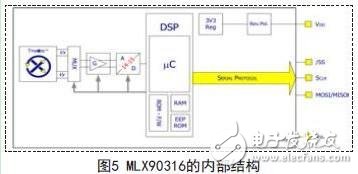
当小型磁铁(径向磁化)在芯片外表上方旋转时,MLX90316芯片内的集磁片(IMC)能够将平行作用于芯片外表的磁场会集起来,并在IMC结构的边际发生正比于磁场的笔直重量,再经过两对坐落IMC下方的传统平面霍尔元件来检测此信号。这两对霍尔元件的放置方向彼此笔直,并都平行于芯片外表(X轴和Y轴方向),经过这样的结构能够将实践视点编码为两个相位差为90°的正弦信号x V和y V ,并正比于磁场强度。
这两路霍尔信号将经过一个彻底差分、带有经典偏移消除技能的模仿处理链进行扩大、采样。调节后的模仿信号再经过ADC(可编程为14bits或15bits)转化为数字信号,之后这两个数字信号再经过芯片内部的由DSP完结的横竖切函数核算模块来核算视点,核算公式为:

实践中x V和y V还存在式(1)所示的差错表达式:

MLX90316的偏移差错、灵敏度差错和笔直度差错都会对输出的视点信息发生较大的影响。尽管芯片内部使用了动态偏移电压消除机制,而且能够在必定程度上经过芯片内置的DSP模块来调整它们之间的正交性,但这些差错仍会反应在传感器的输出信号上。一般由芯片自身所发生的差错在0.3度以内。
传感器输出的表征当时视点值的信号能够以串行数字通讯(SPI)方法输出,也可再经过D/A转化器变回模仿信号,以PWM方式或模仿量方式输出。为了满意规划电路的结构简略、本钱低一级要求,这儿挑选的是SPI输出方式,避免了模仿输入带来的额定差错源。
5.体系软件规划
因为MLX90316所取得的视点信息是以SPI方式输出的,因而程序规划的要害便是SPI通讯的完结。SP总线接口是一种同步串行外设接口它是是一种由4根信号线构成的串行接口协议。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(SS)。SPI接口中,MC9S08DZ60作为主控端,MLX90316作为隶属端。SPI通讯模块首要让MC9S08DZ606读MLX90316输出的数字信号。
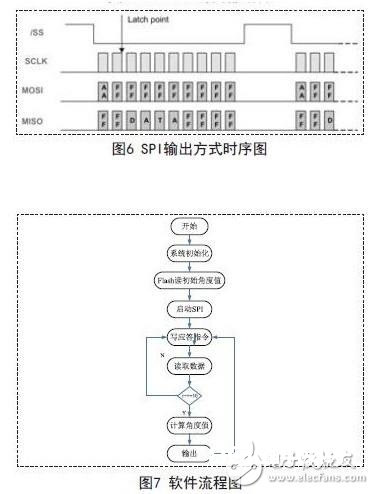
SPI的通讯进程为:主控端先输出一个0xAA以及一个0xFF作为通讯起始信号,接着输出8个0xFF,而从端会一起输出2个0xFF、4个字节的视点信号以及4个0xFF,然后完结一次数据通讯。详细的通讯时序如图6所示,软件流程如图(7)所示。
6.试验验证
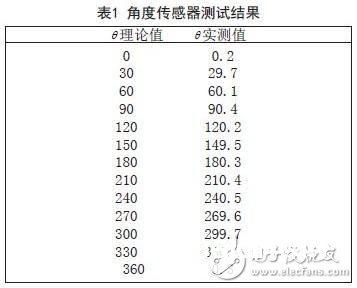
依据以上理论剖析和实践丈量,实测数据如表1所示,视点θ的差错在0.5度以内,满意所要求的技能指标。
7.定论
本文在为完结恶劣环境下视点值的丈量的基础上,介绍了一款依据MLX90316的非触摸式、低本钱、高分辨率,高抗搅扰的磁性视点传感器的规划计划。计划使用霍尔传感器MLX90316所规划的磁性视点传感器具有非触摸式、高精度、高抗搅扰等长处。经过对机械结构和硬件电路的剖析,找出差错来历,在此基础上编写软件算法,完结视点值的丈量,精度能到达0.5°,满意所要求的技能指标,可广泛运用于轿车、电机等工业范畴中。
来历;互联网






