


用于风机、水泵、空调、冰箱、洗衣机、电梯和传输等运用范畴的电动机消耗着全球半数以上的电能,其间大多选用仅能简略敞开和关断电机的高能耗机电驱动设备。仅在家电运用中以变频解决计划代替这些低功率电机就能够削减多达60%的动力消耗。大部分家电选用通用直流电机或单相沟通感应电机,其速度操控办法适当大略,要么选用开断操控,要么依托可控硅操控导通相角,其典型体系功率最高也就能到达50%左右。不过,跟着高效功率器材和先进数字操控器的面世,将更具功率的电机和操控技能运用于最新家电现已成为或许。
沟通电机的挑选
任何沟通电机的轴端输出力矩都取决于定子和转子磁场间的耦合角。定子绕组电流的磁化力与转子发生的气隙磁通相互效果发生力矩,该力矩趋于将转子磁通与定子磁场对齐,当定子磁化电流矢量与转子磁通矢量相位错开90° 时,该力矩到达最大值。在直流电机中,永磁体固定不动,由换相器和电刷的切换效果保证电枢磁场与定子磁极正确对齐。在沟通电机中,气隙磁场旋转,不过,只需定子和转子磁场的旋转频率坚持同步依旧能够发生稳定力矩。
沟通电机具有两种首要类型:同步电机和感应式电机(也一般称作异步电机)。在同步沟通电机中,转子磁场由转子绕组中的直流电流或许由永磁体发生,为发生稳定力矩,定子电流有必要与转子视点和旋转频率坚持同步。在感应式电机中,转子磁场由定子经过变压器效应在转子中发生的感应电流构成,因此,定子和转子磁场的频率可自行同步。感应式电机停止时,与转子线圈耦合的磁通与定子磁场同频,因此转子电流也与定子电流同频;感应式电机滚动时,转子磁通的耦合频率是定子频率与转子旋转频率的差值,即所谓的滑差频率,假如电机以定子频率旋转,则转子磁通稳定,无法感生转子电流,因此力矩输出为零。感应式电机总是以略低于定子频率的某种转速运转,假如负载添加,则转速下降,滑差频率升高,然后感生出更大的转子电流以发生更高的力矩。
感应式电机广泛运用于工业和家用电器等范畴,尤其是在需求固定速度的场合。感应式电机的重要优势在于可直接接入沟通电网并发动运转。反之,同步电机在接入沟通电网之前,其开环输出电压的幅值和频率有必要与电网充沛匹配。大型同步电机正遍及运用于发电范畴,并且同一公共电网中会接入多台发电机。
在变频运用中,为驱动体系挑选电机对错显性的。感应式电机的逆变驱动广泛选用开环电压/频率的速度操控计划。假如选用速度传感器,也有或许完结感应式电机的闭环操控,即经过改动电机的滑差频率以操控电机发生的力矩。可是,因为转子电流无法丈量以及转子电路时间常数很大,因此很难完结感应式电机的高动态操控。 与之相反,只需知道转子的角方位,就能够十分方便地完结同步电机的高动态力矩操控。
永磁同步电机(Permanent magnet synchronous machines ,简称PMSM)在工业伺服范畴现已运用了很多年。因为选用永磁转子,因此这种电机十分高效,与相同尺度的感应式电机比较,能够供给高得多的接连力矩。可是,需求以霍耳效应传感器或许旋转变压器等方位传感器检测其轴角方位,这种对转子角方位传感器的需求曾使其运用只是局限于高端工业驱动范畴,可是近些年发展起来的“无传感器”操控算法已使其在家电范畴的运用不断添加。
压缩机速度操控是永磁同步电机进入家电范畴的开端运用之一。用于空谐和冰箱的传统压缩机选用依托电网频率运转于固定速度的感应式电机,压缩机尺度有必要满意开机后的最大负载情况,可是在正常运转中,要保持设定温度,压缩机就得以适当低的占空比循环断续作业。可是,选用压缩机速度操控后,就可认为正常运转选取最有用的作业速度。仅选用速度操控这一项就能够使成效进步30%以上,别的,因为永磁电机具有更高的功率,因此还能额定进步15%成效。现在,在重视动力本钱的区域商场,如日本等,简直90%的空谐和超越50%的家用冰箱都已选用压缩机速度操控。
开端的无传感器操控器选用六拍换相相序驱动电机绕组,并经过监测开路绕组的反电势估量转子方位。该办法能够供给高鲁棒性的速度操控,可是无法供给滑润的电机力矩。其首要原因是:选用六拍换相相序时,要发生稳定力矩,电机就有必要具有梯形反电势波形,而不是一般的正弦波形;其次,更大的问题在于换相进程中电流切换至后续绕组时所引进的力矩动摇。因为电机反电势会加快退出相的电流衰减,并阻碍进入相的电流上升,因此运转速度越高,问题也变得越糟。电机力矩动摇的高阶谐波成分简略引起体系的机械共振,会在风机、洗衣机、水泵和空调中发生音频噪声。可是,这种操控器十分简略,便于完结,所以依旧在不需求滑润力矩操控的场合中有所选用。
因为选用根据DSP和RISC的低本钱操控器能够完结更为杂乱的操控算法,因此另一种可选的无传感器操控计划近年来变得流行起来。“最新无传感器”操控答应以正弦电压和电流波形驱动永磁同步电机,并以电机电流的丈量值为根底估量转子方位,该算法能够有用地供给稳定力矩,且没有前面说到的六拍操控器所带有的音频噪声问题。别的,该算法能够由新式操控器硬件结构完结,并且无需任何软件编码就能有用地完结杂乱操控。专用集成规划渠道的中心是最新的无传感器操控器,以环绕操控和功率电子元件的附加集成功用等难题为要点,随同兼容芯片规划,能够完结该渠道规划办法,其要点包含可认为数字操控芯片和功率级之间供给必要衔接的三相逆变器驱动芯片和高压电流传感芯片。
无需软件的最新无传感器永磁同步电机操控
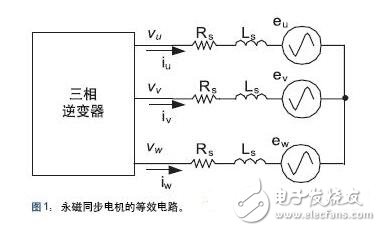
最新无传感器算法根据如图1所示的永磁同步电机的简化模型,电机绕组反电势波形为转子视点的正弦函数,因此能够用于丈量转子视点。经过丈量外加定子电压时流入定子线圈的电流能够核算反电势。为简化数学运算,能够运用 Clarke改换将三相电路改换为两相等效模型,这样就能够用转子视点的正弦和余弦函数表明反电势,其等效电路能够由以下方程描绘:
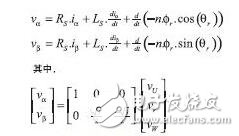
为提取转子视点,能够对反电势项进行积分以核算转子磁通,该磁通与速度无关。最终,因为正弦和余弦磁通项的份额与磁通的幅值无关,因此可用来准确估量转子的视点和速度。
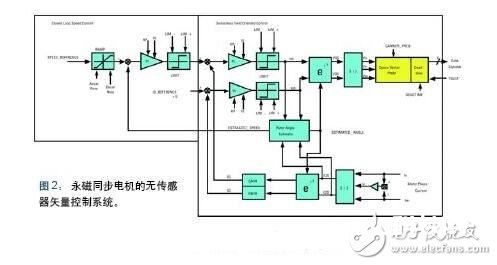
视点估量是完结操控算法的关键环节,不过,要完结图2中以结构图描绘的操控体系仍需求许多其它功用。该操控器由一个速度外环和一个定子电流内环构成,能够别离发生参阅力矩或许操控施加于绕组的电压。定子电流操控环由旋转参阅坐标系中的磁场定向操控(Field Oriented Control,简称 FOC)技能完结,矢量以转子视点为函数旋转,将定子电流改换为两个准直流重量ID和IQ。IQ电流重量与转子磁通正交并发生力矩,其参阅值来自速度环输出。ID电流与转子磁通对齐,能够增强或削弱转子磁通。在大都速度规模内ID给定值为零,不过,假如需求扩展到恒功率速度规模,则能够经过ID设定完结弱磁操控,这关于洗衣机等需求很高旋转速度的运用十分有用。
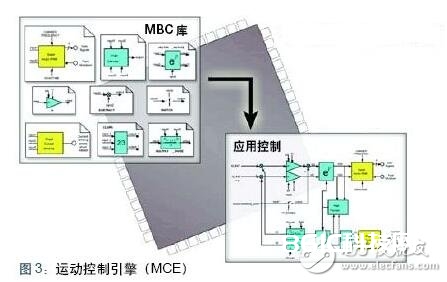
无传感器磁场定向操控算法能够以全新的操控器体系结构完结。图2中所示操控体系的每个功用都能够用硬件宏模块完结,而不是软件。比如份额积分操控、矢量旋转和Clarke改换等功用可共用于一切沟通电机操控体系。如图3所示,运动操控引擎(MoTIon Control Engine)库中包含沟通电机操控模块和其它通用模块。获取电机操控芯片,就能够获得MCE库,以及模仿输入和空间矢量PWM操控等功用。开发人员能够运用图形东西将元件从MCE库拖入自己的操控体系规划,然后运用图形编译器将操控规划翻译为MCE序列指令,以正确次序衔接硬件宏模块然后完结自己的操控体系。该办法能够不用在开发进程中进行软件编码,既能节省时间,又能削减过错。
洗衣机电机的操控挑选
准确操控滚筒转速关于操控滚筒式洗衣机和波轮式洗衣机的洗刷动作都十分重要。滚筒式洗衣机现已在欧洲运用了很多年,并且现在在北美也变得越来越流行起来。波轮式洗衣机要求衣物彻底浸没于水中,而滚筒式洗衣机的摔打效果只需求在滚筒底部装水,这样能够明显下降用水量,并从根本上节省加热洗刷用水所需的动力。
在滚筒式洗衣机中,决议洗刷动作的关键因素是滚筒转速。滚筒的临界转速取决于滚筒半径,高于该转速时,衣物会贴在滚筒壁上;处于该转速时,旋转发生的离心力刚好与衣物的重力平衡;低于该转速时,衣物将贴在滚筒壁上,直到沿半径方向的重力重量超越离心力,一旦升至该视点,衣物就会坠落到滚筒底部。因为滚筒转速可决议衣物的洗刷力度,因此可认为精密织物挑选轻柔的洗刷循环方法。在传统的波轮式洗衣机中,由运用齿轮箱和离合器的机械结构发生搅动效果,因此,引进转速操控体系不只能够简化机械体系,并且能够操控洗刷循环。操控洗刷动作的转速和视点能够使体系规划人员更好地处理洗刷效果,然后开宣布更节水的洗刷循环方法。
前面描绘的许多电机转速操控选项都能够运用于洗衣机。欧洲的滚筒式洗衣机不运用沟通电机,而是运用一种通用的“有刷”电机,而美国的洗衣机运用较大的滚筒尺度,因此其电机的功率规模需超出通用电机计划。
尽管现在仍在运用三相感应式电机,可是近年来永磁同步电机正逐渐成为首选解决计划。感应式电机的磁场来自电流,且有必要由定子励磁电流重量发生,为发生力矩,电流需一起流经定子和转子绕组,其总铜损为永磁电机的两倍以上。因为永磁同步电机比感应式电机更高效,因此与相同功率等级的感应式电机比较,钢铁和铜的运用量更少。在曩昔几年中,全球铜价和钢铁价格简直翻了一倍,与此一起,磁性材料的本钱却在下降。如此看来,永磁不只意味着高效,并且现在也意味着不再贵重。许多家电制造商正在将永磁同步电机解决计划用于波轮式和滚筒式洗衣机,其间部分厂商正在开端选用根据运动操控引擎(MCE)的操控芯片开发其操控器。
结束语
现在能够运用一种集成规划渠道,简化先进的节能家电电机驱动运用的规划进程并下降本钱。规划渠道的中心是专用的无传感器操控芯片以及配套的运动操控引擎 (MCE),该引擎包含完结闭环无传感器正弦操控必需的一切操控元素,且不同于其它品种的DSP或MCU,无需庸俗易错的软件编程环节。






