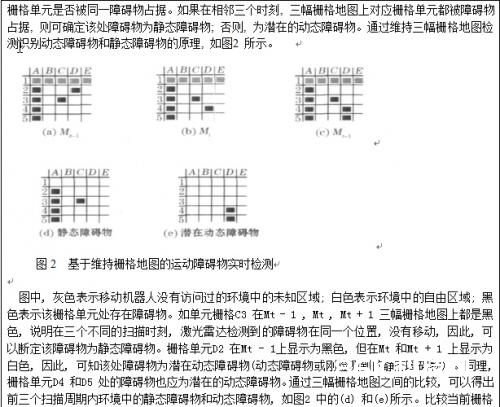
近年来,关于智能机器人避障是一个比较抢手的问题,在许多电子规划比赛中也是一个很典型的赛题。在这方面,避障计划的挑选和软件的规划和奇妙的算法在规划的完成上有着很重要的效果。
在避障计划的挑选上首要依据反射式器材的原理,运用传感器向某一方向发射遇到障碍物后反射的回波,然后测出机器人与障碍物之间的间隔。现在常用的避障手法有以下三种办法。
一、超声波检测避障法
因为超声波指向性强,能量消耗缓慢,在介质中传达的间隔较远,因而超声波常常用于间隔的丈量,如测距仪和物位丈量仪等都能够经过超声波来完成。运用超声波检测往往比较敏捷、便利、核算简略、易于做到实时操控,而且在丈量精度方面能到达工业有用的要求,因而在移动机器人的研发上也得到了广泛的运用。但它无法用于精确定位之上,且超声波受环境要素的影响比较显着,因而关于定位精度较高的场合无法深化运用。
二、红外检测法
红外传感器经过光电开关的勘探,运用被检测物体对红外光束的遮光或反射,由同步回路选通而检测物体的有无,其物体不限于金属,对一切能反射光线的物体均可检测.现有的光电传感器优先,运用的是波长780nm——3um的近红外光,并已有比较稳定的集成化产品,与数字电路的接口也非常简略。但红外线易受搅扰且检测间隔非常有限,所以无法用于远间隔的障碍物检测以及快速的避障方面。
三、激光测距法
激光测距仪,是运用激光对方针的间隔进行精确测定的仪器。激光测距仪在作业时向方针射出一束很细的激光,由光电元件接纳方针反射的激光束,计时器测定激光束从发射到接纳的时刻,核算出从观测者到方针的间隔。激光测距仪重量轻、体积小、操作简略速度快而精确,其差错仅为其它光学测距仪的五分之一到数百分之一。激光测距仪重量轻、体积小、操作简略速度快而精确,因而被广泛用于地势丈量,战场丈量,坦克,飞机,舰艇和火炮对方针的测距,丈量云层、飞机、导弹以及人造卫星的高度等。它是提高高坦克、飞机、舰艇和火炮精度的重要技术装备。因而它在快速避障的范畴也将发挥着极其重要的效果,它的远距丈量给避障的算法核算争取了名贵的时刻,在高速避障的场合有着不行代替的效果。
课题研究计划
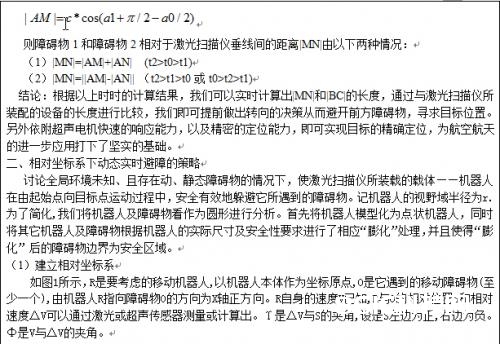
咱们经过激光测距仪来实时检测丈量规模内障碍物的间隔数据并经过RS232传输端口传送到PSoC中进行相应处理,咱们选用了新一代的超声电机作为作动器来完成激光测距仪10度角的环境规模扫描,因其具有快速的呼应才能、杰出的断电自锁才能且不受电磁搅扰的影响等一系列长处,固在航空航天的范畴有较大的运用远景。
本课题中,咱们能够操控超声电机在10度角的规模内到达50Hz的扫描频率,这一点彻底满意了实时避障的外部需求。而且借助于其较高的扫描速率再加上激光测距仪较远的勘探规模,咱们就彻底能够完成提早猜测、快速避障的功用。
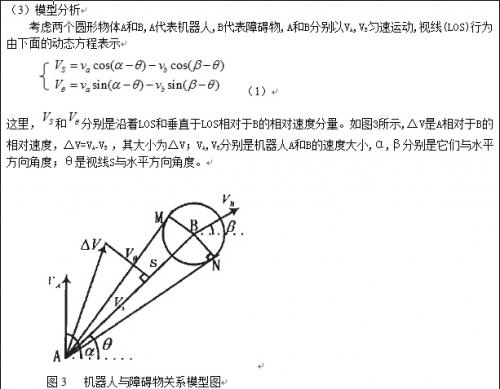
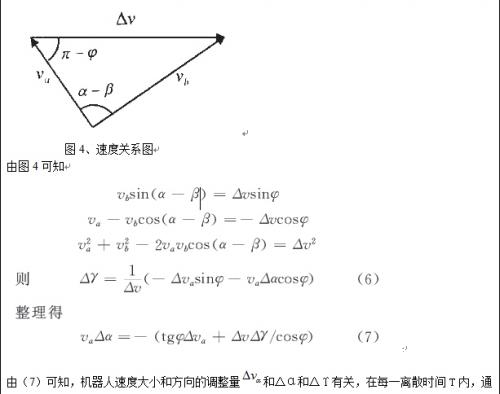
关于避障计划的选取咱们结合了当今动态障碍物检测的不同方法,依据本身体系的特色提出了以下几个不同的计划,关于其最优性的选取,咱们会在后期的作业中结合试验计算选取最好的算法解决计划。