


1导言
在传统的电力拖动范畴,同步操控、张力操控是十分经典的操控环节。一起因为操控目标、工艺要求及操控精度、作用的不同,存在相应的技能开发难点。同步操控广泛的使用于纺织、印染、造纸等职业,因为这样的操控要求,呈现了例如中达同步操控器这样的产品。但随着客户对设备技能含量和本钱的要求,简略的使用同步操控器来完成同步操控已越来越不能满意客户的要求,用人机、PLC、变频器、伺服、直流调速等产品来集成精度更高的同步操控和恒张力操控已经成为新的技能趋势。台达机电产品使用本身的特色及较高的性价比可以为客户供给老练、完善的同步和张力操控的计划和体系。
2传统同步操控及张力操控计划
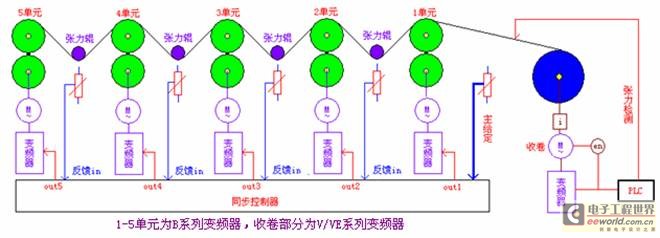
图1 多级同步与张力操控体系框图
2.1同步操控及张力操控操控原理
根据图1所示多级同步与张力操控框图,整个体系以1单元机架为主,1单元的速度为主给定乘以1通道的同步份额系数。即Out1=Kd1*Vo(其间Kd1为1通道同步份额系数,Vo为主给定)。Out2=Kd2*Vo+Kf2*Vf2(Kd2为2通道同步份额系数,Kf2为2通道反应份额系数,Vf2为通道2反应信号),同理Out5=Kd5*Vo+Kf5*Vf5(Kd5为5通道同步份额系数,Kf5为5通道反应份额系数,Vf5为通道5反应信号)。这便是传统的同步操控体系。张力辊的同轴装置一个电位器,电源为+5V电源,当张力辊处于中心平衡位置时将电位器的输出调整为0V,当张力辊违背平衡位置时,反应信号即会有改变,改变的范围在+5V之间,这样反应量乘以反应系数,再加上同步份额系数乘以主给定,所得到的成果便是总输出。因而当张力辊违背平衡位置时,相应的同步操控器的输出会减小或增大,主动调整变频器的频率,到达动态的平衡,使得张力辊一直在平衡位置邻近细微的摇摆,起到同步的作用。
张力操控经过张力传感器实时检测张力、经过张力操控器或PLC进行张力的PID运算,这种张力操控的本质是经过调整速差完成张力的动态安稳。
2.2使用范畴
多级同步与张力操控体系广泛地使用于纺织、印染、造纸等职业(染浆联合机、印染设备)。
2.3缺陷及缺乏剖析
首要,可以看出该体系同步归于开环操控,当负载改变较大的时分,电机的转差率会加大,相应张力辊会违背平衡位置。相应电机的速度会发生改变,假如是对同步的要求十分严厉的场合,或许会有必定的局限性。一起因为速度给定及反应都是模拟量信号,并且关于生产线比较长,设备装置等不行预知的要素,或许会比较简单受到到各种电气耦合的搅扰,构成体系工作不安稳。
张力操控选用PID,因为积分的作用,假如积分增益调整的欠好,简单构成体系的振动或呼应的滞后。关于PID运算的各参数要求较高。但在要求不是十分高的场合,该体系仍是比较安稳的,使用也比较广泛。
3 根据台达机电技能的张力传动操控解决计划
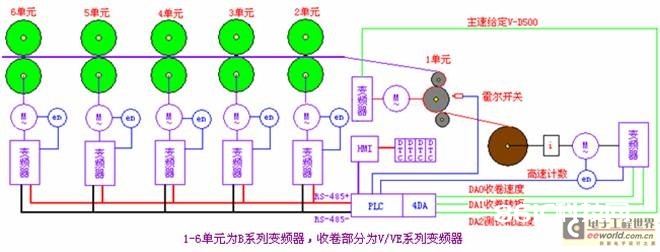
图2硬同步及开环张力闭环矢量操控计划
表1 台达机电主动化渠道装备
3.1 开环张力闭环矢量操控体系规划
硬同步及开环张力闭环矢量操控计划框图参见图2。体系装备参见表1。
为了战胜因为负载的改变构成电机转差率变大,电机特性曲线偏软的缺陷,在每个单元的电机后加编码器反应,并将编码器信号接入变频器,构成闭环矢量操控。这样电机的特性曲线会比较硬,可以有用防止负载小改变时转速及转矩的下降。到达硬同步操控的作用。一切单元变频器的频率给定方法是经过RS485,这样不只省掉了同步操控器,一起有用防止了电气耦合对模拟量信号的搅扰。体系运转愈加的安稳并且本钱也较低,操控作用也更好
3.2 操控算法规划
速度相同以1单元为主,在人机上设定的一般为线速度,要将线速度转换成相应的频率。因为1单元与2单元之间在机械方面的差异、传送介质的打滑等要素的存在,必然决议了1单元变频器与2单元变频器的运转频率不或许完全共同,存在必定的系数联系。同理2单元与3单元、3单元与4单元、4单元与5单元之间、5单元与6单元之间也存在不同的系数联系。根据如下的算法处理每两个单元之间的速度联系:Vn=Kdn*Vn-1+Kfn*Vn-1。整个操控的中心及编程思维参见图3。
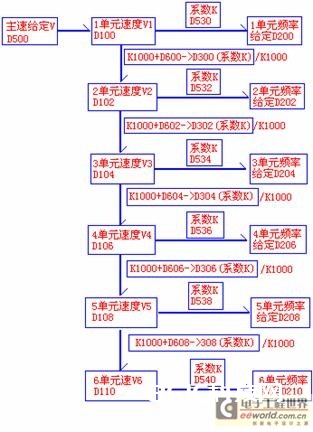
图3 操控中心及编程思维
在调试时需求严厉的依照过程进行:主速设定后,经过调整1单元的份额系数K(D530),将实践用速度表测出的线速度调整到与主速设定的共同,即完成了1单元的调试;同理,其它恣意两单元之间的同步联系的调试也是同理。直到每两单元之间的同步系数悉数确认下来停止。
声明:本文内容来自网络转载或用户投稿,文章版权归原作者和原出处所有。文中观点,不代表本站立场。若有侵权请联系本站删除(kf@86ic.com)https://www.86ic.net/changshang/jieda/229411.html






