


1 导言
步进电机又称脉冲电动机, 是数字操控体系中的一种履行元件, 其功用是将脉冲电信号变换为相应的角位移或直线位移, 且其输出转角、转速与输入脉冲个数、频率有着严厉的同步联系。尽管步进电机是一种数控元件, 易于同数字电路接口, 但一般数字电路的信号能量远远不足以驱动步进电机, 有必要有一个与之匹配的驱动电路来驱动步进电机。步进电机的功能在很大程度上取决于驱动器的好坏。
2 步进电机驱动电路根本组成及作业要求
2. 1根本组成步进电机驱动体系的原理如图1 所示, 操控电路发生步进电机所需求的电脉冲信号, 脉冲分配器把电脉冲信号按规则的方法分配给步进电机各相励磁绕组, 使各相励磁绕组轮番承受脉冲信号的操控。操控电路经脉冲分配后输出的信号很低, 不能供给步进电机所需的输出功率, 有必要通过功率驱动部分进行扩大。
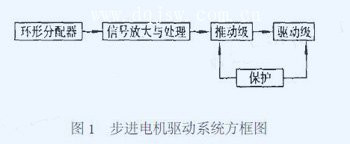
图1步进电机驱动体系方框图
脉冲分配部分可以由硬件电路组成, 也可以由软件完成。当脉冲分配由硬件完成时, 步进电机的驱动体系包括脉冲分配和功率驱动两个部分; 当脉冲分配由软件完成时, 步进电机驱动体系实际上只包括功率驱动部分, 操控电路多由微机及接口电路组成。
2. 2根本要求步进电机对驱动电路来讲, 是一种理性负载, 流经其间的电流不能骤变, 相电流从零上升至额定值和从额定值下降至零, 都需必定时刻。当步进电机高速作业时, 这些延时将显着影响步进电机功能, 使输出转矩急剧下降。此外, 电流截止时, 在相绕组的两头还会发生很高的反电动势。为进步电机功能指标和体系的功率,对步进电机驱动电路一般有如下要求:
1) 通电周期内能供给足够大的矩形波或挨近矩形波的电流;2) 具有供截止期间开释电流的回路, 以下降相绕组两头的反电动势, 加速电流衰减;3) 要求驱动电源功率高、功耗低;4) 要求驱动电源运转牢靠、安稳;5) 要求驱动器的成本低、便于出产。
3 步进电机驱动电路的几种典型方法
驱动电路中对步进电机功能有显着影响的部分是功率扩大电路输出级的结构。通过多年的开展与完善,驱动电路已构成相对固定的单电压驱动电路、高低压切换驱动电路、恒流斩波驱动电路等方法。
3. 1单电压驱动电路单电压驱动是使用最早的一种电路方法, 它的电路原理如图2 所示。它的杰出特点是线路简略, 成本低, 在绕组回路中串接电阻, 用以改进电路的时刻常数以进步电机的高频特性。缺点是: 串接电阻的做法将发生很多的热, 功耗较大, 对驱动电源的正常作业极端晦气, 尤其在高频作业时愈加严峻。因此它一般用于小功率或起动、运转频率要求不高的场合。
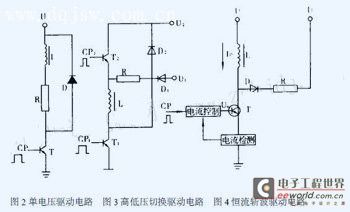
3. 2高低压驱动电路高低压供电驱动方法是在单电压供电的根底上,为了处理单电压驱动的快速功能欠好而开展起来的一种供电技能。其根本思路是, 在脉冲到来时, 在电机绕组的两头先施加一较高电压, 从而使绕组的电流敏捷树立, 使电流树立时刻大为缩短, 在相电流树立起来之后, 改用低电压, 以坚持相电流的巨细, 这样做可以减小限流电阻的阻值乃至去掉限流电阻, 使电源的驱动功率大为进步。典型电路如图3 所示。
这种电路的特点是电流波形得到了很大改进, 电机的矩频特性很好, 起动和运转频率得到很大的进步。
但在高压作业完毕和低压作业开端的联接处的电流波形呈凹形, 致使电机的输出力矩有所下降。
3. 3恒流斩波驱动电路为了补偿高低压驱动电路的高、低压电流波形在衔接处为凹形的缺点, 开展了恒流驱动技能, 使步进电机电流在额定值邻近坚持稳定。图4 为一种恒流斩波驱动电路原理图, 为单极型驱动方法, 它充分利用了现有的电源电压, 可以在较宽的频率范围内作业, 极大改进了电流波形、矩频特性, 因为不需外接限流电阻, 故使能耗大为下降, 进步了电源功率。
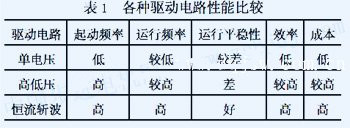
3. 4功能比较各种驱动电路功能比较见表1。
4 完毕语在步进电机发生后的几十年里, 跟着操控技能及电力电子技能的不断开展, 步进电机驱动电路也在不断改进。从单电压驱动到恒流斩波驱动, 各自有自己的优缺点。但前期的晶体管单电压驱动方法已根本筛选,取而代之的是以恒流斩波技能为根底的高功能驱动方法, 这种方法极大地改进了驱动电流波形, 使电流输出根本稳定, 且体系功耗低, 电源功率高。在日益重视节能和环保的今日, 恒流斩波技能将具有十分广泛的使用远景。






