


跟着年代科技的迅猛发展,微电子学和核算机等现代电子技术的成果给传统的电子丈量与仪器带来了巨大的冲击和革命性的影响。惯例的测验仪器外表和操控设备被更先进的智能仪器所替代,使得传统的电子丈量仪器在远离、功用、精度及主动化水平定方面发生了巨大改动,并相应的呈现了各式各样的智能仪器操控体系,使得科学实验和运用工程的主动化程度得以明显进步。
本文规划的电子秤以单片机为首要部件,用C言语进行软件规划,硬件则以桥式传感器 为主,称重规模0~9.999公斤,随时可改动上限阈值,并到达阈值报警的功用。称重传感器输出的电量是模拟量,数值比较小达不到A/D转化接纳的电压规模。所以送A/D转化之前要对其进行前端扩大、整形滤波等处理。然后,A/D转化的成果才干送单片机进行数据处理并显现。其数据显现部分选用LCD显现,成本低且能很好地完成所要求的功用。本规划的悉数操控功用,包含根本的称重功用、累计计费功用、去皮功用以及显现购物清单的功用,能够设定10种产品的单价,因为体系资源丰富,还能够便利的扩展其运用。
为主,称重规模0~9.999公斤,随时可改动上限阈值,并到达阈值报警的功用。称重传感器输出的电量是模拟量,数值比较小达不到A/D转化接纳的电压规模。所以送A/D转化之前要对其进行前端扩大、整形滤波等处理。然后,A/D转化的成果才干送单片机进行数据处理并显现。其数据显现部分选用LCD显现,成本低且能很好地完成所要求的功用。本规划的悉数操控功用,包含根本的称重功用、累计计费功用、去皮功用以及显现购物清单的功用,能够设定10种产品的单价,因为体系资源丰富,还能够便利的扩展其运用。
1 方案规划
1.1 规划思路
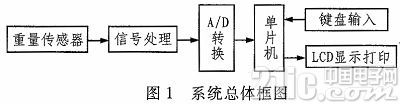
该体系可完成:电子秤的称重根本功用,对收集到的代表分量的信号能一起显现分量、金额和单价;分量的单位为公斤,最大称重为9.999公斤;单价和总价的单位为元,最大数值为9999.99元;具有去皮功用和总额累加核算功用。自拟10种产品名称,能显现购物清单,清单内容包含:产品名称,数量,单价,金额,本次购物总金额、购货日期、收银员编号和售货单位名称,具有中文显现功用。全体结构框图如图1所示。
1.2 器材选型
1)传感器
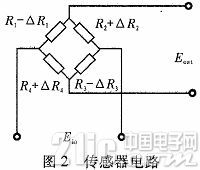
称重传感器首要由弹性体、电阻应变片电缆线等组成,内部线路选用惠更斯电桥,当弹性体承受载荷发生变形时,输出信号电压可由下式给出:
L-PSIII型传感器,量程20 kg,精度为0.01%,满量程时差错0.002kg。能够满意本体系的精度要求。其原理如图2所示。
2)A/D转化器
由上面对传感器量程和精度的剖析可知:A/D转化器差错应在0.03%以下。
12位A/D精度:10 kg/4096=2.44 g 14位A/D精度:10 kg/16384=0.61 g
考虑到其他部分所带来的搅扰,12位A/D无法满意体系精度要求。所以咱们需求挑选14位或许精度更高的A/D。
ICL7135双积分型A/D转化器精度高,但速度较慢,具有准确的差分输入,输入阻抗高(大于103MΩ),可主动调零,超量程信号,悉数输出于TTL电平兼容,抗搅扰才能强。对正负对称的工频搅扰信号积分为零,所以对50 Hz的工频搅扰按捺才能较强,对高于工频搅扰有杰出的滤波效果。只需搅扰电压的平均值为零,对输出就不发生影响。特别对本
体系,缓慢改动的压力信号,很简略遭到工频信号的影响。故而选用双积分型A/D转化器可大大下降对滤波电路的要求。积分型A/D转化器可大大下降对滤波电路的要求。作为电子秤,体系对AD的转化速度要求并不高,精度上14位的AD足以满意要求。
2 体系硬件规划
2.1 前端信号处理
压力传感器输出的电压信号为毫伏级,所以对运算扩大器要求很高。体系中选用专用外表扩大器芯片INA126。该芯片内部选用差动输入,共模按捺比高、差模输入阻抗大、增益高、线性度好,而且外部接口电路简略。扩大器增益G=5+80kΩ/RG,经过改动RG的巨细来改动扩大器的增益。INA126构成的扩大器及滤波电路。
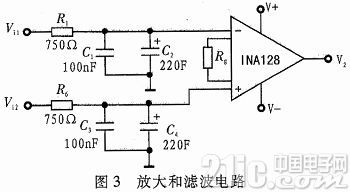
经过调理的阻值来改动扩大倍数。弱小信号Vi1和Vi2被别离扩大后从INA126的第6脚输出。A/D转化器ICL7135的输入电压改动规模是-2~+2 V,传感器的输出电压信号在0~20 mv左右,因此扩大器的扩大倍数在200~300左右,可将接成的滑动变阻器。因为ICL7135对高频搅扰不灵敏,所以滤波电路首要针对工频及其低次谐波引进的搅扰。因为压力信号改动非常缓慢,所以滤波电路能够把频率做得很低。
2.2 模数转化电路
ICL7135的时钟频率典型值为200 kHz最高答应为1200 kHz,时钟频率越高,转化速度越快。每输出一位BCD码的时刻为200个时钟周期,选通脉冲坐落数据脉冲的中部,假如时钟频率太高,则数据的承受程序还没有承受结束,数据就现已消失了。考虑到此体系频率要求不是太高,ICL7135需求外接振荡器,时钟频率取200 kHz。
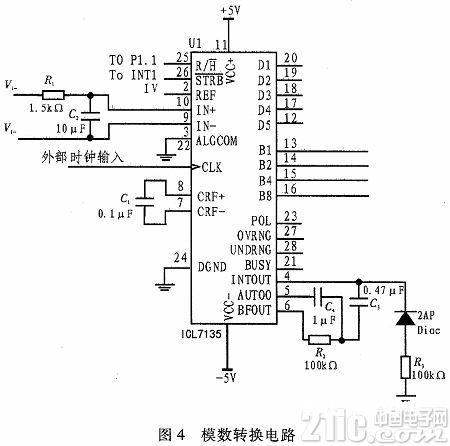
此外ICL7135外部还需求外接积分电阻、积分电容,因为A/D转化器精度与外接的积分电阻、积分%&&&&&%的精度无关,因此能够下降对元件质量的要求。%&&&&&%L7135当精度要求较高时,应选用外接基准源。一般接其典型值1 V。
2.3 键盘输入和显现输出
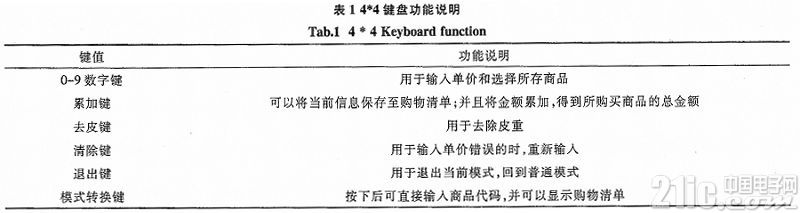
本体系选用16按键矩阵组来完成,分为10个数字键0~9及6个操控键。考虑到需求显现汉字,选用带有中文字库的液晶显现器LCD12864。其间键盘阐明如表1所示。
3 软件规划
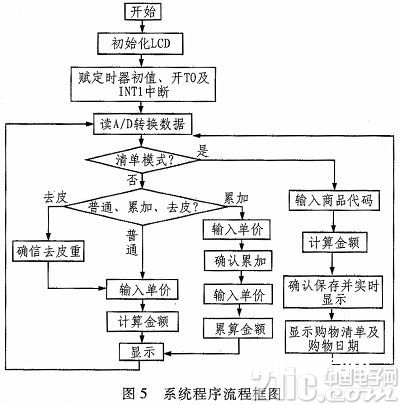
软件的全体规划首要包含:数据收集和处理、模数转化子程序、键盘程序、显现程序等几个模块。主程序的流程图如图5所示。
4 定论
本规划根本上满意规划要求,但很大程度上仍需较大的改善。首要,数模转化只能作为演示程序以完成功用之用,而要使精度到达要求,至少要运用14位或以上的AD;其次,程序比较冗繁,仍需优化。再次,经过此次规划,深感一个团队的重要性。因为组队匆促,再加上相互间了解不多,以致同组队员半途抛弃。个人之力总有限制,难以完成一切要求。






