


跟着机器人技能的不断开展,机器人的运用领域正逐步多样化,其间,特种机器人是机器人技能的一个重要分支。与在结构化条件下作业的一般机器人比较,特种机器人将面对更为杂乱的作业环境,因而其履行电机有必要具有扭矩大、功率高的特色。在驱动电路的规划方面,需求进步其接受过载电流的才能,其操控体系也有必要具有实时处理杂乱信息和使命的才能。文献中提出了一种依据
PCI04和CPLD的运动操控体系建立计划,因为PCI04相关技能较老练,该计划能够在必定程度上缩短研制周期。但因为PCI04没有电机操控的专用模块,需求在运用层进行相应模块的扩展,这必将进步操控体系的体积和功耗。文献中选用ARM9和以色列出产的军等第Elnlo操控器建立操控体系,此种办法自主化程度较低,而且因为运用通用器材构建整个体系,必然会发生必定的硬件资源糟蹋,性价比不高。文献中提出运用PLC构建机器人操控体系的计划,在这个计划中存在编程杂乱和体系造价较高的问题。作者的改善和研讨如下:
①该体系选用模块化地规划思维,依据DSP的大功率多轴操控体系包含主控模块、驱动模块、反应模块、通讯模块。整个体系集成化程度高、体积小、功耗低。
②依据DSP的大功率多轴操控体系选用定点DSP,TMS320F2812作为中心芯片,该芯片具有专用的电机操控单元——事情管理器模块,运算才能强。硬件资源丰厚。运用光电阻隔、电容滤波等抗搅扰技能进步了体系的全体安稳性。
③依据DSP的大功率多轴操控体系选用大电流、半桥、智能芯片BTS7960建立H桥驱动电路。将驱动电路的继续作业电流进步到43 A,进步了整个体系的作业功用。
1 依据DSP的大功率多轴操控体系构成
为增强特种机器人的动力功用,作者挑选了瑞士MAXON公司出产的两款大功率直流伺服电机作为被控目标,其作业电压均为24v。在电机操控卡的挑选上,选用了TI公司推出的数字信号处理器TMS320F2812作为中心微处理器。该数字信号处理器除了具有其他DSP芯片所具有的强壮运算才能和实时呼应才能外。片内还集成了大容量的Flash存储器和高速RAM,并供给丰厚的外设接口和硬件资源,能够在极大地进步特种机器人的空间运用率的一起,节约外围电路的规划。而且,TMS320F2812的双电源供电机制能够在必定程度上下降体系的功率损耗。
在电机驱动电路规划上,为了进步体系的安稳性,作者挑选Infineon公司出产的大电流、半桥智能芯片BTS7960建立H桥。微处理器通过CAN总线完成与上位机的通讯。运用TMS320F2812片内集成的事情管理器模块发生PWM操控信号,实时操控电机的滚动。电机编码器输出信号通过芯片AM26LS32接入微处理器的QEP模块接口上,完成对电机转速信息的收集。在驱动电路接人采样电阻,对电机的电流进行采样,并运用F2812内部的AD转化器将模拟量转化为数字量,供给给内核芯片,完成对电流环的操控。如上所述,依据DSP的大功率多轴操控体系整体框图如图1所示。
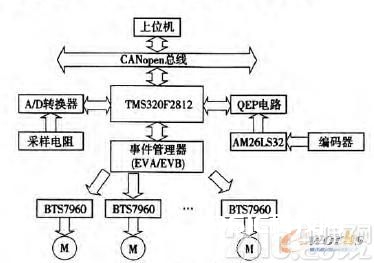
图1体系整体框图
2 依据DSP大功率多轴操控体系硬件电路规划
2.1 驱动电路规划
因为一般特种机器人作业环境相对杂乱,对驱动电路的驱动才能要求较高,因而需规划机器人专用驱动电路。现在,大电流有刷直流电机的驱动电路多选用达林顿管或MOS管建立,该类驱动电路具有体积大、离散性高,以及需添加散热片等坏处。跟着科学技能的迅猛开展,依据大功率MOS管的H桥驱动芯片逐步显现出其不行代替的优势。笔者选用两片英飞凌公司推出的高电流PN半桥驱动芯片BTS7960进行H桥的建立。该芯片的运用电路原理框图如图2所示。MOS管导通和关断时刻由SR引脚外接电阻的阻值决议,调理外接电阻的阻值可进步体系防电磁搅扰的才能。运用频率为25 kHz的脉宽调制(PWM)信号操控BTS7960B的开关动作,完成对电机的正反向PWM驱动、反接制动、能耗制动等操控状况。
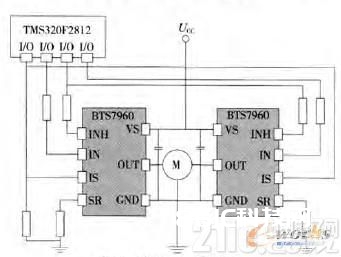
图2BTS7960原理图
2.2 电流采样电路规划
BTS7960芯片的引脚IS既具有电流检测功用,又能够供给毛病输出信号(如图3所示)。在正常形式下(电流检测形式),BTS7960内部的一个电流源与IS引脚相连,这个电流源流出的电流与流经高边MOS管的电流成正比,相应的电压值由外部电阻R。决议。在毛病状况下,Is引脚与一个独立的电流源相连,IS引脚的电压值由供电电压和外接电阻决议。因而,能够运用BTS7960自带的电流检测引脚进行电流检测。本体系的操控目标为两款直流伺服电机,其作业电压均为24 V,额外功率别离为150 W和90 w,额外电流别离为6。25 A和3.75 A。已知DSP的A/D转化器的最大采样电压为3 V,挑选采样电阻阻值为1 kΩ。扩大倍数设为4和7,能够得到很好的反应作用,采样电路规划成果如图4所示。
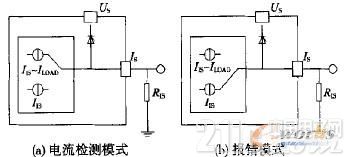
图3 IS引脚功用
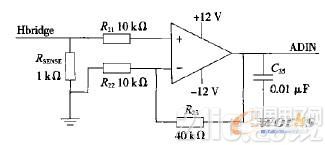
图4采样电路图
2.3 方位检测模块规划
在依据DSP的大功率多轴操控体系中,与MAXON电机同轴安装了增量式光电编码器。编码器信号由DSP的QEP电路模块处理。当电机作业时,两路正交脉冲被送人F2812的CAPl/QEPl和CAP2/QEP2接口。QEP电路中的方向检测逻辑能够依据两路脉冲序列的相位差,发生一个方向信号作为通用定时器2或定时器4的方向输入。假如CAP1/QEPl引脚的脉冲输入相位超前CAP2/QEP2引脚,则通用定时器进行递加计数;反之,定时器进行递减计数。正交编码脉冲电路对输入脉冲的上升沿和下降沿均进行计数,因而通过QEP电路后的时钟输出是每路输入脉冲频率的4倍,EVA模块将这个4倍频后的时钟作为通用定时器2或定时器4的时钟输入。
2.4 体系时钟模块和电源模块电路规划
TMS320F2812需求一路时钟输入信号作为DSP内核、片内外设以及外部接口的时钟源。时钟电路能够选用无源晶振和有源晶振两种装备方法。在电路规划中,为了确保有源晶振与DSP芯片的电平匹配,选用3.3 V作为有源晶振的电源。为了下降电路中的电磁搅扰,在电源与有源晶振接IZl之间添加了磁珠和滤波电容,在有源晶振的时钟信号输出端也添加了滤波电容。
新一代的DSP芯片均向着低电源电压、低功耗的方向开展。为了下降功耗,叉便于完成DSP芯片和外设间的接口,TMS320F2812芯片选用双电源供电机制,以大大下降DSP芯片的功耗。依据机器人操控体系需求,选用TI公司出产的双路低压差输出的电源芯片TPS767D301作为电源模块中心芯片。该芯片的输入电压规模是4~10 V,典型值为5 V,共发生两路输出,一路输出电压为3。3 V,一路为可调输出(1。2~5。5 V)。
2.5 体系通讯电路规划
因为特种机器人机身内部空间狭小,作业环境恶劣,电气搅扰源很多,所以通讯抗搅扰技能显得尤为重要。因为CAN总线在抗搅扰才能和数据传输速率方面显着优于其他总线,所以作者挑选CAN总线作为上位机和直流伺服电机操控体系的通讯方法。TMSS20F2812片上带有CAN总线操控器,CAN总线收发器选用TI公司的接口芯片
SN65HVD230(契合IS011898),此外,IS011898规范要求CAN总线上的终端节点两头并联120 n的匹配电阻,以防止总线上传输的信号发生反射。
3 依据DSP大功率多轴操控体系软件规划
依据DSP的大功率多轴操控体系的软件开发渠道选用的是TI公司的CCS3.3.为了下降编程的杂乱度,依照模块化的方法将DSP大功率多轴操控器的软件规划分红若干的功用模块别离编程和调试。软件由主程序、CAN通讯中止程序、定时器中止服务程序等组成。DSP大功率多轴操控器上电之后,DSP芯片首要进行初始化,然后初始化操控器的状况;从而和上位机进行通讯,在判别上位机所发数据的性质之后,转向相应的处理程序段。体系发动时设置PWM频率为25 kHz。通过定时器1发动ADC,使每个PWM周期都对电流进行一次采样,并在A/D转化中止处理程序中对电流进行调理,来操控PWM占空比的输出。每50次电流调理收集一次光电编码器的速度信号,并对速度进行调理。体系主程序如图5所示,子程序略。
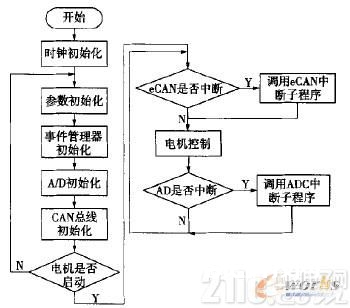
图5操控体系主程序流程图
4 试验成果及剖析
为了查验依据DSP的多轴操控体系的运用作用,笔者挑选MAXON直流伺服电机作为被控目标,进行了电机的运动操控试验。运用数字万用表和数字示波器别离对电机作业过程中依据DSP的大功率多轴操控体系的作业电压和输出波形进行了丈量。变压模块为TPS767D301,电源电压为5.000 V,理论电压别离为1.800和3.300 V时,丈量电压别离为1.868和3.317 V。由丈量成果可知,电源模块的理论值和实践丈量值根本符合,试验成果表明电源模块作业安稳。
MAXON直流伺服电机的各项参数如下:额外电压24 V,额外功率90 w,额外电流3.75 A,最大答应转速为8 200 r/rain。DSP大功率操控器发生的PWM信号的参数如下:周期40μs,频率15 kHz,峰峰值3.30 V。依据PWM信号占空比的不同,电机的转速会发生相应改动。此试验中,共设定了两种占空比的PWM信号,别离为16.7%和50.0%。别离测得操控器输出PWM信号和电机两头波形信号如图6和图7所示。
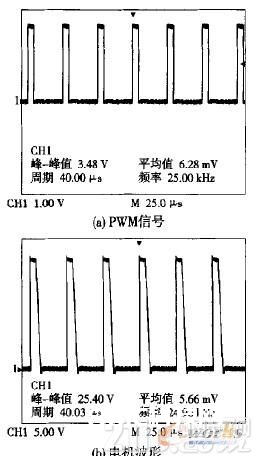
图6占空比为16.7%的试验成果波形
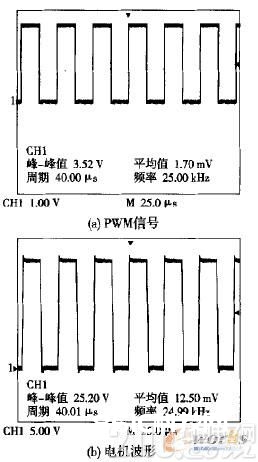
图7 占空比为50.0%的试验成果波形
由示波器测验成果可知,PWM波通过驱动电路H桥的扩大,峰峰值从3.48 V被扩大为25.40 V,能够为MAXON直流伺服电机供给运动所需的作业电压。通过驱动电路后,PWM波的周期和频率并没有改动,而且从图中能够看出在电机运动过程中相电压的波形比较安稳。
5 定论
为了开发一种适用于特种机器人的依据DSP的大功率多轴操控体系,笔者以TMS320F2812为机器人操控体系中心芯片,选用高电流PN半桥驱动芯片BTS7960建立了大功率驱动电路,完成了对多个直流伺服电机的大功率、高精度的联合操控。整个操控体系构建合理、结构紧凑、集成度高、性价比好,圆满解决了新式特种搜救机器人对操控体系体积和安稳性的要求。试验成果表明。该DSP大功率多轴操控器作业安稳、功用牢靠,达到了预期目标。






