


概览
从波音 747 客机的导航操作、轿车驾驭每天都会运用的 GPS 导航体系,到寻宝者要找到深藏于森林某处的瑰宝,GPS 技能现已敏捷融入于多种运用中。合理立异技能不断提高GPS 接纳器效能的一起,相关的技能特性亦越来越完好。时至今日,软件乃至可树立 GPS 波形,以准确仿真实践的信号。除此之外,仪器总线技能亦不断提高,现在即可透过PXI 仪控功用,以记载并播映实时的 GPS 信号。
介绍
因为 GPS 技能已于一般商用商场逐步遍及,因而多项规划均着眼于提高相关特性,如:
1) 下降耗电量
2) 可寻觅弱小的卫星信号
3) 较快的撷取次数
4) 更准确的定位功用
透过此运用阐明,将可了解进行多项 GPS 接纳器量测的办法:灵敏度、噪声系数、定位准确度、初次定位时刻,与方位差错。此篇技能文件是要能让工程师完全了解 GPS 的量测技能。对刚开端触摸 GPS 接纳器量测作业的工程师来说,可对常见的量测作业略知一二。若工程师已具有 GPS 量测的相关经历,亦可透过此篇技能文件开端了解新的仪控技能。此篇运用阐明将分为下列数个阶段:
GPS 技能的根底
GPS 量测体系
常见量测概述
灵敏度
初次定位时刻 (TTFF)
定位准确度与重复性
追寻准确度与重复性
每个阶段均将供给数项实作诀窍与技巧。更重要的是,读者可将自己的成果与 GPS 接纳器获得的成果进行比较。透过自己的成果、接纳器的成果,再调配理论量测的成果,即可进一步检视自己的量测数据。
GPS 导航体系介绍
全球定位体系 (GPS) 为空间架构的无线电导航体系,本由美国空军所研制。尽管 GPS 原是开发做为军事定位体系之用,却也对民间发生重要影响。事实上,您现在就或许在车辆、船只,乃至移动电话中运用 GPS 接纳器。GPS 导航体系包括由 24 组卫星,均以 L1 与 L2 频带 (Band) 进行多重信号的传输。透过 1.57542 GHz 的 L1 频带,各组卫星均发生 1.023 Mchips BPSK (二进制相位键移) 的展频信号。展频序列则运用称为 C/A (coarse acquisition) 码的虚拟随机数 (PN) 序列。尽管展频序列为 1.023 Mchips,但实践的信号数据传输率为 50 Hz [1]。在体系的原始布署作业中,一般 GPS 接纳器可达 20 ~ 30 公尺以上的准确度差错。此种差错肇因于美国军方依安全理由所附加的随机频率差错所形成的。可是,此称为挑选性牢靠度 (Selective availability) 差错信号源,已于 2000 年 5 月 2 日撤销。在今日,接纳器的最大差错不超越 5 公尺,而一般差错已降至 1 ~ 2 公尺。
不论是 L1 或 L2 (1.2276 GHz) 频带,GPS 卫星均会发生所谓的「P 码」隶属信号。此信号为 10.23 Mbps BPSK 的调变信号,亦运用 PN 序列做为展频码。军方即透过 P 码的传输,进行更准确的定位作业。在 L1 频带中,P 码是透过 C/A 码进行反相位 (Out of phase) 的 90 度传输,以保证可于相同载波上测得此 2 种信号码 [2]。P 码于 L1 频带中可达 -163 dBW 的信号功率;于 L2 频带中可达 -166 dBW。相对来说,若在地球表面的 C/A 码,则可于 L1 频带中到达最小 -160 dBW的播送功率。
GPS 导航信号
针对 C/A 码来说,导航信号是由数据的 25 个结构(Frame) 所构成,而每个结构则包括 1500 个位 [2]。此外,每组结构均可分为 5 组 300 个位的子结构。当接纳器撷取 C/A码时,将消耗 6 秒钟撷取 1 个子结构,亦即 1 个结构有必要消耗 30 秒钟。请留意,其实某些较为深化的量测作业,才有或许真实花费 30 秒钟以撷取完好结构;咱们将于稍后评论之。事实上,30 秒钟仅为撷取完好结构的均匀最短时刻;体系的初次定位时刻 (TTFF) 往往超越 30 秒钟。
为了进行定位作业,大多数的接纳器均有必要更新卫星星历 (Almanac) 与星历表 (Ephemeris) 的信息。该笔信息均包括于人造卫星所传输的信号数据中,,而每个子结构亦包括专属的信息集。一般来说,咱们可透过子结构的类别,从而辨识出其中所包括的信息 [2][7]:
Subframe 1: 包括时序批改 (Clock correction)、准确度,与人造卫星的运作景象
Subframes 2-3: 包括准确的轨道参数,可核算卫星的的确方位
Subframes 4-5: 包括大略的卫星轨道数据、时序批改,与运作信息。
而接纳器有必要透过卫星星历与星历表的信息,才干够进行定位作业。一旦得到各组卫星的的确间隔,则高阶 GPS 接纳器将透过简略的三角表达式 (Triangulation algorithm)回传方位信息。事实上,若能整合虚拟间隔 (Pseudorange) 与卫星方位的信息,将可让接纳器准确辨认其方位。
不论是运用 C/A 码或 P 码,接纳器均可追寻最多 4 组人造卫星,进行 3D 定位。追寻人造卫星的进程极为杂乱,不过简略来说,便是接纳器将透过每组卫星的间隔,预算出自己的方位。因为信号是以光速 (c),或为 299,792,458 m/s 跋涉,因而接纳器可透过下列等式核算出与人造卫星之间的间隔,即称为「虚拟间隔 (Pseudorange)」:

等式 1.「虚拟间隔 (Psedorange)」为时刻间隔 (Time interval) 的函式 [1][4]
接纳器有必要将卫星所传送的信号数据进行译码,才干够获得定位信息。每个卫星均针对其方位进行播送 (Broadcasting),接纳器跟着透过每组卫星之间的虚拟间隔差异,以决议自己的的确方位 [8]。接纳器所运用的三角量测法 (Triangulation),可由 3 组卫星进行 2D 定位;4 组卫星则可进行 3D 定位。
设定 GPS 量测体系
测验 GPS 接纳器的首要产品,为 1 组可仿真 GPS 信号的 RF 向量信号发生器。在此运用阐明中,读者将可了解应怎么运用 NI PXI-5671 与 NI PXIe-5672 RF 向量信号发生器,以到达量测意图。此产品并可调配 NI GPS 东西组,以模仿 1 ~ 12 组 GPS 人造卫星。
完好的 GPS 量测体系亦应包括多种不同配件,以达最佳效能。举例来说,外接的固定式衰减器 (Attenuator),可提高功率准确度与噪声层 (Noise floor) 的效能。此外,依据接纳器是否支撑其直接输入埠的 DC 偏压 (Bias),某些接纳器亦或许需求 DC 阻绝器 (Blocker)。下图即为 GPS 信号发生的完好体系:
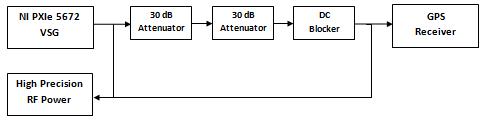
图 1. GPS 发生体系的程序图
如图 1 所示,当测验 GPS 接纳器时,往往选用最高 60 dB 的外接 RF 衰减 (留白,Padding)。固定式衰减器至少可供给量测体系 2 项长处。首要,固定式衰减器可保证测验激起的噪声层低于 -174 dBm/Hz 的热噪声层 (Thermal noise floor)。其次,因为可透过高准确度 RF 功率计 (Power meter) 校准信号准位,因而固定式衰减器亦可提高功率准确度。尽管仅需 20 dB 的衰减即可契合噪声层的要求,但若运用 60 ~ 70 dB 的衰减,则可到达更高的功率准确度与噪声层效能。稍后将接着评论 RF 功率校准,而图 2 抢先阐明衰减对噪声层效能所形成的影响。

表1. 不同衰减所需的仪器功率比较
如表1所示,衰减可用于削弱噪声,而不只限于 -174 dBm/Hz 的热噪声层。
RF 向量信号发生器
当挑选 RF 向量信号发生器时,NI LabVIEW GPS 东西组可一起支撑 NI PXI-5671 与 NI PXIe-5672 RF 向量信号发生器。尽管此 2 款适配卡可发生 GPS 信号,但因为 PCI Express 总线速度较快,并可马上进行 IF 等化 (Equalization),因而 NI PXIe-5672 向量信号发生器较遭到喜爱。此 2 款适配卡均具有 6 MB/s 总数据传输率与 1.5 MS/s (IQ) 取样率,可从磁盘串流 GPS 波形。
尽管 PXI控制器硬盘可轻松保持此数据传输率,NI 仍主张运用外接磁盘进行额定的贮存容量。下图为包括 NI PXIe-5672 的常见 PXI 体系:

图 2. 包括 NI PXIe 5672 VSG 与 NI PXI-5661 VSA 的 PXI 体系
GPS 东西组可于完好导航信号期间,树立最长 12.5 分钟 (25 个结构) 的波形。依 6 MB/s 的取样率,则最大档案约为 7.5 GB。因为上述的波形档案尺度,一切的波形均可贮存于多款硬盘选项之一。这些波形贮存资源选项包括:
PXI 控制器的硬盘 ( 引荐运用 120 GB 硬盘晋级)
如 HDD 8263 与 HDD 8264 的外接 RAID 设备
外接 USB 2.0 硬盘 (已透过 Western Digital Passport 硬盘进行测验)
上述各种硬盘设定,均可支撑超越 20 MB/s 的接连数据串流作业。因而,任何贮存选项均可仿真 GPS 信号,并进行记载与播映。在稍后的阶段中,将阐明仿真与记载 GPS 波形的整合作业,并进行 GPS 接纳器效能的特性参数描绘 (Characterization) 作业。
树立仿真的 GPS 信号
因为 GPS 接纳器是透过天线传输数据,并获得卫星星历与星历信息;当然,仿真的 GPS 信号亦需求该项信息。卫星星历与星历信息,均透过文本文件表明,可供给卫星方位、卫星高度、机器状况,与绕行轨道的相关信息。此外,在树立波形的进程中M,亦有必要挑选客制参数,如星期时刻 (TOW)、方位 (经度、纬度、高度),与仿真的接纳器速率。以此信息为根底,东西组将主动挑选最多 12 组人造卫星、核算一切的都卜勒位移 (Doppler shift) 与虚拟间隔 (Pseudorange) 信息,并接着发生所需的基频波形。为了可赶快入门,东西组设备程序亦包括典范的卫星星历与星历档案。此外,更可由下列网站直接下载:
Almanac information (The Navigation Center of Excellence) http://navcen.uscg.gov/gps/almanacs.htm
Ephemeris information (NASA Goddard Space Flight Center) http://cddis.gsfc.nasa.gov/gnss_datasum.html#brdc
透过客制的卫星星历与星历档案,即可树立特定日期与时刻的 GPS 信号,乃至可回溯数年曾经。请留意,当挑选这些档案时,有必要挑选与日期相对应的档案。一般来说,卫星星历与星历信息为每日更新,因而当挑选特定时刻与日期时,亦应挑选同 1 天的档案。下载的星历档案往往为紧缩的「*.Z」格局。因而,在调配运用 GPS 东西组之前,档案有必要先行解紧缩。
只需运用东西组中的「主动形式 (Automatic mode)」,即可包括大多数的 GPS 模块作业,并可透进程序规划的办法,核算都卜勒与随机间隔信息;当然,此功用亦供给手动形式。在手动形式 (Manual mode) 中,运用者可单个指定每组人造卫星的信息。图 4 即显现此 2 种作业形式所供给的输入参数。
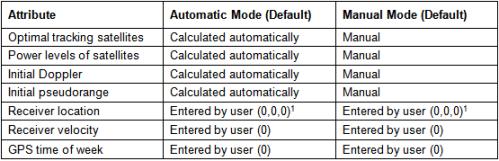
1LLA (longitude, latitude, altitude)
表2. GPS 东西组主动与手动形式的默认值
请留意,东西组将依据所指定的星历档案,于或许的数值规模中强制设定 GPS 的 TOW。因而,若挑选的数值超出该星历档案的规模,东西组将主动设定为最挨近的数值并提示运用者。「niGPS Write Waveform To File」典范程序即可树立 GPS 基频波形 (主动形式),而其人机接口即如下图所示。
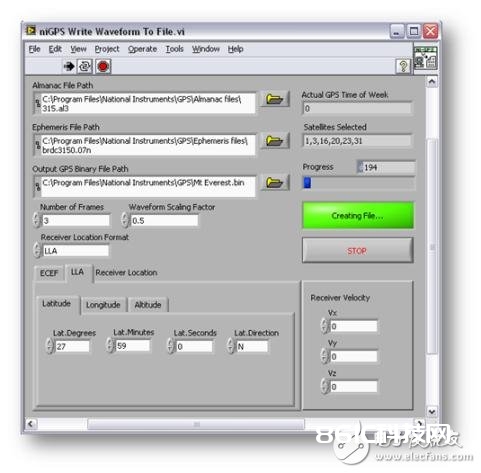
图 3. 简略的典范程序即可树立 GPS 测验波形。
请留意,某些特定量测作业,将决议用户所树立 GPS 测验的文件类型。举例来说,当量测接纳器灵敏度时,将仿真单一人造卫星。另一方面来说,需求定位作业的量测 (如TTFF 与方位准确度),所运用的 GPS 信号将仿真多组人造卫星。依据上述需求,NI GPS 东西组所调配的典范程序,将一起包括单位星与多重卫星仿真功用。
记载空气中的 GPS 信号
树立 GPS 波形时,其共同又日趋遍及的办法,便是直接从空气中撷取
单一卫星灵敏衡量测
在了解灵敏衡量测的根本理论之后,接着将进行实践量测的各个程序。一般测验体系均是透过直接联机,将模仿的 L1 单一卫星载波送入至 DUT 的 RF 通讯端口中。为了获得C/N 比值,咱们将接纳器设定透过 NMEA-183 协议进行通讯。在 LabVIEW 中,则仅需串联 3 笔 GSV 指令,即可读取最大的卫星 C/N 值。
依据 GPS 规范阐明,单一 L1 卫星若坐落地球表面,则其功率应不低于 -130 dBm [7]。可是,顾客对室内与野外的 GPS 接纳器运用需求,已进一步压低了测验约束。事实上,多款 GPS 接纳器可达最低 -142 dBm 定位追寻灵敏度,与最低 -160 dBm 信号追寻。在一般作业点 (Operating point) 时,大多数的 GPS 接纳器均可敏捷继续承认低于6dB 的信号,因而咱们的测验激起则运用 -136dBm 的均匀 RF 功率强度。
若要到达最佳的功率准确度与噪声水平 (Noise floor) 效能,则主张针对 RF 向量信号发生器的输出,运用外接衰减。在大多数的事例中,40 dB ~ 60 dB 的外接衰减,可让咱们更挨近线性规模 (功率 ≥ -80 dBm),妥善操作发生器。因为各组接纳器的定位衰减 (Fix attenuation) 均不甚固定,因而有必要先行校准体系,以决议测验激起的正确功率。
在校准程序中,咱们可考虑:1) 信号的峰值均匀比 (Peak-to-average ratio)、衰减器各个部分的差异,还有任何接线作业或许的插入损耗 (Insertion loss)。为了校准体系,应先从 DUT 堵截联机,再将该联机接至 RF 向量信号剖析器 (如 PXI-5661)。
Part A:单一卫星校准
当履行灵敏衡量测时,RF 功率强度的准确性,实为信号发生器最重要的特性之一。因为接纳器可获得 0 数字准确度的 C/N 值 (如 34 dB-Hz),因而出产测验中的灵敏衡量测可达 ± 0.5 dB 的功率准确度。因而,有必要保证咱们的仪控功用至少要到达持平或以上的效能。因为一般 RF 仪控作业是专为大规模功率强度、频率规模,与温度条件所规划,因而在履行根本体系校准时,量测的可重复性 (Repeatability) 应远高于特定仪器效能。下列章节将进一步阐明可保证 RF 功率准确度的 2 种办法。
办法 1:单一被迫式 RF 衰减器:
尽管运用外接衰减,是为了保证 GPS 信号发生作业可达最佳噪声密度,但实践仅需 20 dB 的衰减,即可保证噪声密度低于 -174 dBm/Hz。当运用 20 dB 的固定板 (Pad) 时,仅需将仪器设定为超越 20 dB 的 RF 功率强度即可。为了到达 -136 dBm 的方针,仪器应程序规划为 -115 dBm (假定 1 dB 的连接线插入损耗),且将 20 dB 衰减器直接连至发生器的输出。则所到达的 RF 功率将为 -136 dBm,但仍具有额定的不承认性。假定 20 dB 的固定板具有 ± 0.25 dB 的不承认性,且 RF 发生器亦于 -116 dBm 具有 ± 1.0 dB 的不承认性,则全体的不承认性将为 ± 1.25 dB。因而,尽管办法 1 最为简略且不需进行校准,但因为体系中的多项组件均未通过校准,因而或许接着发生不承认性。请留意,形成仪器不承认性最首要的原因之一,即为电压驻波比 (Voltage standing wave ratio,VSWR)。因为被迫式衰减器是直接连至仪器的输出,所以反射回仪器的驻波即为实践衰减。因为下降了功率的不承认性,因而可提高全体功率的准确性。
请留意,此处亦运用高效能 VNA 的确量测被迫衰减器。透过此量测设备,即可于 ± 0.1 dB 的不承认性之内,决议所要套用的衰减。
办法 2:通过校准的多组被迫衰减器
校准 RF 功率的第二种办法,便是运用高准确度的 RF 功率计 (高于 ± 0.2 dB 的准确度,并最低可达 -70 dBm) 调配多款固定式衰减器。因为咱们是以固定频率,与相对较小的功率规模操作 RF 发生器,所以可有用批改由发生器形成的任何过错。此外,因为被迫衰减器是以固定频率进行线性动作,因而亦可校准其不承认性。在办法 2 中,首要即有必要保证发生体系可到达最佳效能,且将不承认性降至最低。此高准确度功率计可达优于 80 dB 的动态规模 (往往为双头式仪器),从而保证最低的量测不承认性。
透过高准确度的功率计,即可运用 3 种量测作业进行体系校准:1 种用于向量信号发生器的 RF 功率,别的 2 种量测作业可校准衰减器。为了到达最佳的不承认性,则应设定体系所需的最少数测次数。若要到达 -136 dBm 的 RF 功率强度,则可将 RF 仪器程序规划为 -65 dBm 的功率强度,并运用 70 dB 固定衰减 (假定 1 dB 插入损耗)。为了的确进行 RF 功率强度的程序规划作业,则可透过固定的 Padding 校准实践衰减。校准程序如下:
1) 将 VSG 程序规划为+15 dBm 功率强度
可敞开 Measurement and Automation Explorer (MAX) 并运用测验面板。透过测验面板以 +15 dBm 发生 1.58 GHz 接连波 (CW) 信号。
2) 以高准确度的功率计量测 RF 功率
运用 RF 功率计,让功率到达仪器功率准确度规范的 +14.78 dBm (或近似值) 之内。
3) 附加 70 dB 固定式衰减器(30 dB + 20 dB + 20 dB) 与任何必要的连接线
4) 以高准确度的功率计量测 RF 功率
将功率计设定为最大均匀值 (512),以量测 RF 功率强度。此处的读数为 -56.63 dBm。
5) 核算 RF 总消耗
若以 +14.78 dBm 减去 -56.63 dBm,即可在整合了衰减器与连接线之后,保证发生 71.41 dB 的功率消耗。请留意,多款衰减器往往具有最高 ± 1.0 dB 的不承认性。因而量测所得的衰减或许最高达 ± 3.0 dB 的改动。所以校准衰减器更显重要,保证已知衰减可达较低的不承认性。
依据衰减器与连接线的校准例程,即可承认所需的 RF 功率强度有必要到达 -136 dBM。依据前述的 71.41 dB 衰减,有必要将 RF 向量信号发生器设定为 -58.59 dBm 的功率强度。若要承认程序规划往后的功率无误,则可依下列过程进行:
6) 直接将功率计附加至 RF 向量信号发生器
并移除一切的衰减器与连接线。
7) 将 RF 发生器设定必要数值,使其最终功率到达-136 dBm。
而程序规划的数值应为 -58.59 dBm,即由 -136 dBm + 71.41 dB 而得。
8) 以功率计量测最终功率。
请留意,所测得的 RF 功率,将因仪器的功率准确度而有所不同。即便测得 -58.59,则实践成果亦将因仪器的不承认性而发生少许改动。
9) 调整发生器功率直到功率计读出-58.59 dBm
尽管 RF 发生器可于必定的容错规模内进行作业,但此数值不只具有可重复性,亦可调整 RF 功率计进行校准,直到得出适宜的数值停止。
透过上述办法,仅需 3 项 RF 功率量测作业,即可决议所需的 RF 功率。因而,假定量测设备具有 ± 0.2 dB 的不承认性,则可得出 – 136 dBm 的功率不承认性将为 ± 0.6 dBm (3 x 0.2)。
Part B:灵敏衡量测
现在校准 RF 量测体系的功率之后,接着仅需进行 RF 发生器的程序规划,将功率强度设定足以让接纳器回传最小的 C/N。尽管用于量测灵敏度的 RF 功率将因接纳器而有所不同,可是接纳器 C/N 与 RF 功率的比值,将出现完美的线性联系。在咱们的测验中,可假定所需的 C/N 为 28 dB-Hz 以进行定位。透过等式 12,即可得出接纳器 C/N 比值与噪声指数之间的联系。

等式 14. C/N 做为噪声指数与卫星功率的函式
假定卫星功率安稳,则可发现由接纳器报答的 C/N 比,简直就等于接纳器的噪声指数函式。下表显现可到达的多样 C/N 比值。
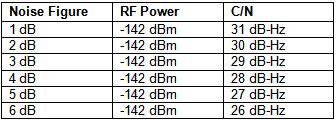
表6. C/N 为噪声指数的函式
一般来说,接纳器上的 GPS 译码芯片组,将得出定位作业所需的最小 C/N 比值。可是,又有必要透过整组接纳器的噪声指数,才干决议现在功率强度所能到达的 C/N 比值。因而,当量测灵敏度时,有必要先了解定位作业所需的最小 C/N 比值。
其实有多种办法可量测灵敏度。如上表所示,RF 功率与灵敏度具有直接相关性。因而,可依据现有的灵敏度功率强度,量测接纳器的 C/N 比值;亦可依据不同的 RF 功率强度,得出体系灵敏度。
为了阐明这点,则可留意 RF 信号功率与 GPS 接纳器 C/N 比值,在不同功率强度之下的联系。下方量测作业所套用的激起,即疏忽了第一组 LNA 而进行,且接纳器的全体噪声指数约为 8 dB。而表7 显现相关成果。
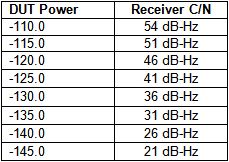
表7. 接纳器的 C/N 比值为 RF 功率的函式
如表7 所示,此量测典范的 RF 功率与 C/N 比值,简直是出现完好的线性联系。而若运用高输入功率模仿 C/N 比值,将发生例外情况;接纳器报表将出现或许的最大 C/N 值。可是,因为在任何条件下,进行试验的芯片组均不会发生超越 54 dB-Hz 的 C/N 值,所以这些成果均属预期规模之中。
依据表6中所示 RF 功率与灵敏度之间的线性联系,其实仅需针对接纳器模仿不同的功率强度,即可进行 GPS 接纳器的出产测验作业。若接纳器在 -142 dBm 得出 28 dB-Hz 的C/N 值,则亦可于 -136 dBm 得到 34 dB-Hz 的 C/N 值。若特别注分量测速度,则可运用较高的 C/N 值,再从成果中推断出灵敏度的信息。
找出噪声指数
又依据等式 13 与 14,调配相关载噪比 (Carrier-to-noise ratio),则可得出接纳器或芯片组的噪声指数。亦如下方等式 15 所示。

等式 15. 接纳器噪声指数为功率与 C/N 比值所构成的函式。
而由表7 所示,接纳器的噪声指数将直接与 RF 功率强度与载噪比互成份额。依据此联系,咱们仅需针对 RF 功率强度与 C/N 进行相关性,即可量测芯片组的噪声指数。而此项量测中请留意,应以 0.1 dB 为单位添加发生器的功率。因为 NMEA-183 协议所得到的卫星 C/N 值,是以最挨近的小数字为准,因而在量测接纳器 C/N 比值时,应预算噪声指数达 1 位数的准确度。典范成果如图 18 所示。
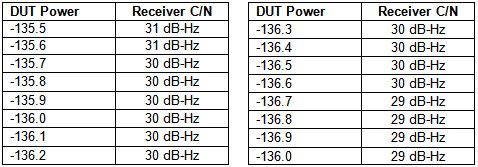
表8. DUT 功率与接纳器 C/N 的相关。
如表8 所示,若 RF 功率强度处于 -136.6 dBm ~ -135.7 dBm 之间,则其 C/N 比值将保持于 30 dB-Hz。若以舍入法核算 NMEA-183 的数据时,则简直可承认 -136.1 dBm 功率强度将发生 30.0 dB-Hz 的 C/N 比值无误。透过等式 14,芯片组的噪声指数则为 -174.0 dBm + -136.1 dBm + 30.0 dB-Hz = 7.9 dB。请留意,此核算是依据 2 组不承认性系数而进行:向量信号发生器的功率不承认性,还有接纳器所发生的 C/N 不承认性。
多组卫星的 GPS 接纳器量测
灵敏衡量测需求单一卫星激起,而有多项接纳器量测需求可仿真多组卫星的单一测验激起。更进一步来说,如初次定位时刻 (TTFF)、定位准确度,与准确度下降 (Dilution of precision) 的量测作业,均需求接纳器进行定位。因为接纳器需求至少 4 组卫星进行 3D 定位作业,因而这些量测将较灵敏衡量测来得耗时。也因而,多项定位量测作业均于查验与校准作业中进行,而非出产测验时才履行。
此章节将阐明可为接纳器供给多组卫星信号的办法。在评论 GPS 仿真作业时,亦将让运用者了解 TTFF 与定位准确衡量测的履行办法。若是评论 RF 记载与播映作业,将一起阐明应怎么在多项环境条件下,校准接纳器的效能。
量测初次定位时刻 (TTFF) 与定位准确度
初次定位时刻 (TTFF) 与定位准确衡量测,为规划 GPS 接纳器的首要查验作业。若您已将多种消费性的 GPS 运用了然于胸,即应知道接纳器回传其实践方位所需的时刻,将大幅影响接纳器的用处。此外,接纳器报答其方位的准确度亦甚为重要。
为了让接纳器可进行定位,则应透过导航消息 (Navigation message) 下载星历与年历信息。因为接纳器下载完好 GPS 结构有必要消耗 30 秒,因而「冷发动 (Cold start)」的TTFF 状况则需求 30 ~ 60 秒。事实上,多款接纳器可指定数种 TTFF 状况。最常见的为:
冷发动 (Cold Start):接纳器有必要下载年历与星历信息,才干进行定位。因为有必要从各组卫星下载至少 1 组 GPS 结构 (Frame),因而大多数的接纳器在冷发动状况下,将于30 ~ 60 秒时进行定位。
热发动 (Warm Start):接纳器的年历信息没有超越 1 个星期,且不需求其他星历信息。一般来说,此接纳器可于 20 秒内得知现在时刻,并可进行 100 公里内的定位 [2]。大多数热发动状况的 GPS 接纳器,可于 60 秒内进行定位,有时乃至仅需更短的时刻。
热开机 (Hot Start):接纳器具有最新的年历与星历信息时,即为热开机状况。接纳器仅需获得各组卫星的时序信息,即可开端回传定位方位。大多数热开机状况的 GPS 接纳器,仅需 0.5 ~ 20 秒即可开端定位作业。
在大部分的情况下,TTFF 与定位准确度均与特定功率强度相关。值得留意的是,若能于多种情况下查验此 2 种规范的准确度,其实极具有其信息价值。因为 GPS 卫星每 12个小时即绕行地球 1 圈,所以可用规模内的卫星信号随时都在改动,也让接纳器可在不同的状况下回传正确成果。
下列章节将阐明应怎么运用 2 笔数据源,以履行 TTFF 与定位准确度的量测,包括:
1) 接纳器在其布署环境中,透过天线所获得的实时数据
2) 透过空中传递所记载的 RF 信号,并将之用以测验接纳器所记载的数据
3) 当记载实时数据后,RF 发生器用于模仿星期时刻 (Time-of-week,TOW) 所得的仿真数据用此 3 笔不同的数据源测验接纳器,可让各个数据源的量测作业均具有可重复特性,且均彼此具有相关性。
量测设定
若要获得最佳成果,则所挑选的记载方位,应让卫星不致遭到周遭建筑物的阻止。咱们挑选 6 层楼停车场的顶楼进行测验,以无建物掩盖的房顶尽或许触摸多组卫星信号。透过GPS 芯片组的多个开机形式,均可履行 TTFF 量测作业。以 SIRFstarIII 芯片组为例,即可重设接纳器的出厂、冷发动、热发动,与热开机形式。下方所示即为接纳器履行相关测验的成果。
若要量测水平定位的准确度,则有必要依据经、纬度信息从而了解相关过错。因为这些指数均以「度」表明,因而可透过下列等式转化之:

等式 16. 核算 GPS 的定位过错
请留意该等式中的 111,325 公尺 (111.325 公里),即等于地球圆周的 1 度 (共 360 度)。此指数是依据地球圆周 360 x 111.325 km = 40.077 km 而来。
Off-the-Air GPS
请留意该等式中的 111,325 公尺 (111.325 公里),即等于地球圆周的 1 度 (共 360 度)。此指数是依据地球圆周 360 x 111.325 km = 40.077 km 而来。
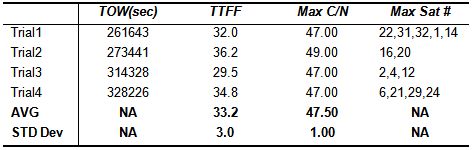
表9.「Off-the-air」GPS 信号的 TTFF 与最大 C/N 比值
依据初始的 「Off-the-air」成果,则可发现 GPS 接纳器在规范的 3 秒差错内,可到达 33.2 秒的 TTFF。这些量测成果均坐落 TTFF 规范的容错规模内。而更重要的,便是可透过仿真与记载的 GPS 数据,从而比比赛测成果与实践成果。
依据上列线性差错等式,即可核算各次量测的线性规范差错
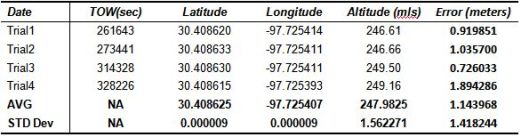
表10. 由「Off-the-air」GPS 信号所得的 LLA
请留意,若要将「Off-the-air」GPS 信号、仿真信号,与播映信号进行相关,则有必要先进行「Off-the-air」信号功率的相关性。当进行 TTFF 与定位准确衡量测时,RF 功率强度根本上不太会影响到成果。因而,有必要比对「Off-the-air」、仿真,与记载 GPS 信号的 C/N 比值,即可进行 RF 功率的相关性作业。
已记载的 GPS 信号
尽管可透过实时信号量测 TTFF 与定位差错,可是这些量测作业往往不行重复;好像卫星均继续盘绕地球运转,而非固定不动。进行可重复 TTFF 与定位准确度的量测办法之一,便是运用已记载的 GPS 信号。此章节将接着阐明应怎么透过已记载的 GPS 信号,以进行实时 GPS 信号的相关作业。
已记载的 GPS 信号,可透过 RF 向量信号发生器再次发生。因为有必要播映信号,则校准 RF 功率强度最简略的办法,便是比对实时与记载的 C/N 值。当获得「Off-the-air」信号时,则可发现一切实时信号的 C/N 峰值均约为 47 ~ 49 dB-Hz 之间。
而播映信号的功率强度,亦可到达与实时信号相同的 C/N 值,从而承认其所得的 TTFF 与方位准确度,将可与实时信号发生相关。在下图 21 中,咱们运用的星期时刻 (TOW)值与实时「Off-the-air」信号的 TOW 附近,而在 4 次不同的试验下得到 TTFF 成果。
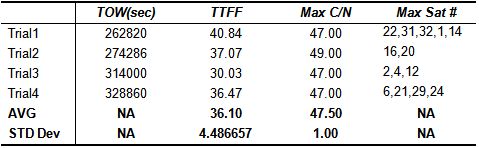
表11. 由「Off-the-air」GPS 信号所得的 TTFF
除了量测初次定位时刻之外,亦可量测 GPS 接纳器所获得的经度、纬度,与高度信息。下图显现相关成果。
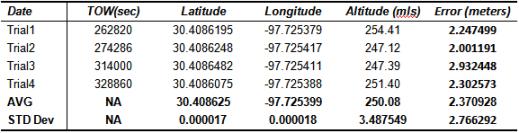
表12. 由「Off-the-air」GPS 信号所得的 LLA
从表11与12 中可留意到,其实透过已记载的 GPS 信号,即可得到合理的可重复 TTFF 与 LLA (Latitude、Longitude、Altitude) 成果。可是,因为这些量测作业的过错与规范差错,仅略微高于「Off-the-air」量测的差错,因而简直可将之疏忽。因为肯定准确度 (Absolute accuracy) 较高,所以可重复性亦较优于「Off-the-air」量测作业。
仿真的 GPS 信号
最终 1 种可进行 TTFF 与定位准确衡量测的 GPS 测验信号来历,即为仿真的多组卫星 GPS 信号。透过 NI LabVIEW GPS 东西组,即可透过由运用者界说的 TOW、星期数,与接纳器方位,仿真最多 12 组卫星。此 GPS 信号仿真办法的首要长处,便是透过或许的最佳讯噪比 (SNR) 构成 GPS 信号。与实时/记载的 GPS 信号不同,依此种办法所树立的可重复信号,其噪声功率甚小。图 23 即出现了仿真多组卫星信号的频域。
VSA 设定
Center: 1.57542 GHZz
Span: 4 MHz
RBW: 100 Hz
Averaging: RMS, 20 Average
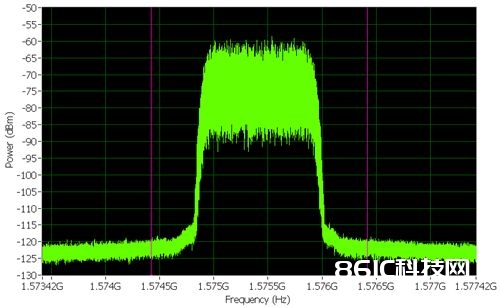
图 11. 仿真多组卫星 GPS 信号的带内功率 (Power-in-band) 量测作业
当透过仿真的多组卫星波形测验接纳器时,则可针对接纳器所供给的 C/N 比值进行相关,以再次评价所需的 RF 功率。
一旦能为 RF 功率强度进行相关,则可接着量测 TTFF。当量测 TTFF 时,应先发动 RF 向量信号发生器。过了 5 秒钟之后,可手动将接纳器转为「冷」开机形式。一旦接纳器获得定位信息,则将报答 TTFF 信息。下图则出现仿真 GPS 信号的相关成果:
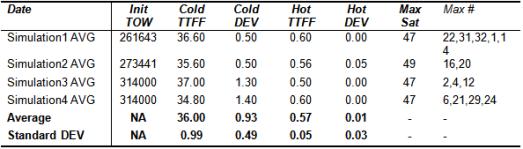
表13. TTFF 数值的 4 项专属模仿
请留意表13中的一切仿真作业均运用相同的 LLA (Latitudes、Longitude,与 Altitude)。
此外,若要量测 TTFF,咱们亦可依不同的 TOW 树立仿真作业,以核算 LLA 的准确度与可重复性。请留意,因为在数个小时之内,可用的卫星信号将继续改动,因而有必要设定多种 TOW 以测验准确度 (如表13)。而表14 则表明其 LLA 信息。
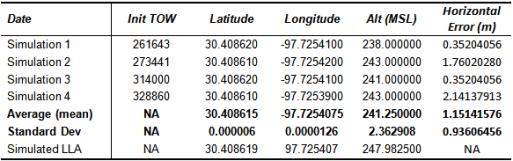
表14. 多项 TOW 仿真作业的水平准确度
在表14 中,可依据模仿的定位,核算出公尺为单位的水平过错。又如图 20 所示,可透过下列等式找出过错:

等式 17. 仿真 GPS 信号的定位过错
而针对咱们所运用的接纳器而言,其水平定位最大差错为 5.2 公尺,水平定位均匀差错为 1.5 公尺。而透过表8 所示,咱们所运用的接纳器均可达指定的约束之内。
如从前所述,接纳器的准确度,与可用的卫星信号密不行分。也便是说,接纳器的准确度或许在数个小时内大幅改动 (卫星信号改动),可是其可重复性却极小。为了承认咱们的GPS 接纳器亦为如此,则可针对特定的模仿 GPS 波形履行多项测验。此项作业首要是有必要承认,RF 仪控并不会对仿真的 GPS 信号发生额定的不承认性。如下方图 26 所示,当重复运用相同的二进制档案时,咱们所运用的 GPS 接纳器将得到极高可重复性的量测。

表15. 相同波形的各次测验,其差错亦具有极高的可重复性
回头再看表10,运用仿真 GPS 信号的最大长处之一,便是可到达可重复的定位成果。因为此特性可让咱们承认:所报答的定位信息,并不会因为规划迭代 (Iteration) 而发生改动,因而在开发的规划查验阶段中,此特性分外重要。
量测动态定位准确度
GPS 接纳器测验的最终 1 种办法,便是量测接纳器的追寻功用,使其在大规模的功率强度与速度中保持定位。在曩昔,此种测验 (往往亦为功用测验) 的常见办法之一,便是整合驱动测验与多途径衰减 (Multi-path fading) 模仿。在驱动测验 (Drive test) 中,咱们运用可导入很多信号减损 (Impairment) 的已知途径,驱动原型接纳器。因为驱动测验是将天然减损套用至 GPS 卫星信号的简略办法,因而这些量测往往亦不行重复。事实上,如GPS 卫星移动、气候条件的改动,乃至年度时刻 (Time of year) 的要素,均可影响接纳器的效能。
因而,现在有 1 种逐步遍及的办法,便是于驱动测验上记载 GPS 信号,以很多信号减损查验接纳器效能。若要进一步了解设定 GPS 记载体系的办法,请参阅前述章节。而在驱动测验计划中,有多款 PXI 机箱可供挑选。最简略的办法,便是运用 DC 机箱并以轿车电池进行供电。其次可运用规范的 AC 机箱,调配转化器即可运用轿车电池供电。在此 2种选项中,DC 机箱的耗电量较低,但亦较难以于试验室中供电。如下列所示的规范 AC 机箱运用成果,其所供电的体系则包括 1 组外接的车用电池,与 1 组 DC to AC 转化器。
一旦咱们完结 GPS 信号的记载作业,即可透过相同的测验数据重复测验接纳器。在下方的阐明中,咱们追寻接纳器的经度、纬度,与速度。透过串行端口与每秒 1 次的 NMEA-183 指令读取速率,从接纳器读取所需的数据。在下方量测中,咱们所出现的接纳器特性参数,仅有定位与卫星 C/N 值。请留意,在履行这些量测作业的一起,亦可剖析其他信息。尽管下列成果中并未量测水平准确度衰减 (Horizontal dilution of precision,HDOP),但此特性参数亦可供给很多的接纳器定位准确度信息。
若要获得最佳成果,则应的确同步化接纳器与 RF 发生作业的指令接口。下方所示成果中,咱们将 COM 埠 (pin 2) 的数据信道做为开端触发器,以针对RF 向量信号发生器与GPS 模块进行同步化。此同步化办法仅需恣意波形发生器的 1 个频率循环 (100 MS/s),即可进行向量信号发生器与 GPS 接纳器的同步化。因而最大的曲解 (Skew) 应为 10µS。并请留意,因为咱们将获得接纳器的经纬度,所以由同步化作业所形成的准确度过错,将为 10µs 乘以 Max Velocity (m/s),或为 0.15 mm。
运用上述的设定,咱们即可准时获得接纳器的经纬度。成果即如下图所示:


图12. 每 4 分钟所得到的接纳器经纬度
在图12所出现的数据中,即运用已记载的驱动测验信号,获得核算、定位,与速度的相关信息。此外咱们可观察到,在每次的测验之间,此项信息具有相对的可重复性;即为每个独立轨道所出现的差异。事实上,这便是咱们最需求的接纳器可重复性 (Repeatability)。因为可重复性信息将可预估 GPS 接纳器准确度的改动景象,因而咱们亦可核算波形各个样本之间的规范差错。在图 29 中,咱们在各次同步化取样作业之间,绘出规范的定位差错 (相对于均匀方位)。

图 13. 依时刻获得的经度与纬度规范差错
当看到水平规范差错时,可留意到规范差错在 120 秒时快速添加。为了进一步了解此现象,咱们亦依据接纳器的速度 (m/s) 与 C/N 值的 Proxy,绘出总水平规范差错。而咱们预先假定:在没有高功率卫星的条件下,卫星的 C/N 比值仅将影响接纳器。因而,咱们针对接纳器所回传 4 组最高高度的卫星,均匀其 C/N 比值而绘出另 1 组 C/N 的Proxy。成果即如下列图 14所示。

图14. 定位准确度与 C/N 值的相关性
如图14所示,在 120 秒时所发生的峰值水平过错 (规范差错中),即与卫星的 C/N 值发生直接相关,而与接纳器的速度无关。此次取样的规范差错约为 2 公尺,且已低于其他取样约 10 公尺的差错。一起,咱们可发现前 4 名的 C/N 均匀值,由将近 45 dB-Hz 骤降至 41 dB-Hz。
上述的测验不只阐明 C/N 比值对定位准确度的影响,亦阐明晰已记载 GPS 数据所能进行的剖析作业品种。在此测验中的 GPS 信号驱动记载作业,是在我国深圳 (Shenzhen) 北方的惠州市 (Huizhou) 所进行。并接着于德州奥斯汀 (Austin Texas) 测验实践的接纳器。
定论
如整篇文件所看到的,现在已有多项技能可测验 GPS 接纳器。尽管如灵敏度的根本量测,最常用于出产测验中,可是此量测技能亦可用于查验接纳器的效能。这些测验技能尽管各有改动,可是均可于单一 PXI 体系中全数完结。事实上,GPS 接纳器均可透过仿真或记载的基频 (Baseband) 波形进行测验。透过整合的办法,工程师可履行完好的 GPS 接纳器功用测验:从灵敏度到追寻其可重复性。






