


摘要:研讨一种根据TMS320F28335 DSP(Digital Signal Processor)的全数字飞翔器操控体系的硬件规划,剖析了其结构组成:主操控器电路、舵面方位检测电路和通讯等硬件电路规划。经过屡次实验调试,所规划的硬件体系能够满意飞翔器功用要求。
关键词:飞翔器;TMS320F28335;操控体系;硬件电路
跟着科学技术的开展前进,对飞翔器飞翔操控体系要求的不断进步,使得用传统的规划模仿飞翔操控器规划办法无法满意要求。高速处理芯片的推出使研讨导弹飞翔器等非线性操控体系规划具有实际和久远含义。根据此种原因,为进步飞翔操控器的可靠性和操控精度,本文选用TI公司的32位浮点DSP(TMS320F28335)为操控器中心,完结数字信号处理和导航解算,以及串口通讯,数据收集和人机交流等使命。
1 操控体系原理
舵机操控体系是依照选定的扶引规则不断调整与批改飞翔器的飞翔轨道,扶引和操控飞翔器飞向方针的硬件和软件调集。它的功用包含设定方针和飞翔器的飞翔参数,依照选定的扶引规则构成飞翔器飞翔操控指令,经归纳、校正后输出操控指令调整舵机推力方向或舵面偏转角,改动飞翔器的飞翔状况和飞翔道路,使飞翔器按答应差错射中方针。飞翔器假如违背操控体系预先设定的状况(飞翔姿势发生改变),经过传感器可探测到违背的方向和巨细,操控器依照相应的操控算法处理差错后,输出必定的操控信号操作相应的舵机,操控对应舵面进行偏转,使飞翔器姿势角逐步抵达设定状况。然后抵达改动飞翔器的飞翔状况和飞翔道路,使飞翔器按规则的差错击中方针。当飞翔器姿势角抵达预先设定状况,则舵面回归初始方位,飞翔器此刻按设定姿势正常飞翔。飞翔器操控体系原理如图1所示。

2 舵机操控体系硬件结构
飞翔器舵机操控体系主要有捷联惯导体系、主操控器及舵机部分构成。飞翔器的实时飞翔姿势信息有捷联惯导体系给定,DSP经过与预订姿势信息求差错后得到4路舵机舵面的预订参阅方位。舵面的实时方位信号是由舵机输出轴上的视点传感器供给,该方位信号经过调度电路处理之后输入到DSP的AD采样端。主操控器以DSP为中心经过内部操控算法处理后输出各种操控信号,输出的操控信号经过专用4路舵机驱动板卡,驱动4路舵机按要求滚动。舵机体系作为飞翔操控的履行机构,由4套无刷直流电机、谐波减速器、方位传感器组成。分别设备在飞翔器尾部彼此笔直的两个轴平面上,其设备方位顺时针排序为1#、2#、3#、4#舵机,在详细运用过程中,1#舵机和3#舵机可配合同步运用,2#舵机和4#舵机可配合同步运用。整个体系的硬件结构如图2所示。
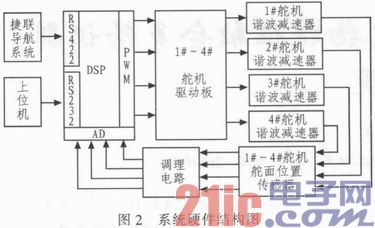
本体系由上位机向飞翔操控器发送飞翔器预先设定的操控指令,经过UART总线传输到主操控器。捷联惯导体系中飞翔器实时姿势数据、线性电位器上舵面实时方位信号以及上位机上预设的操控指令数据,一起组合后代入到的飞翔操控算法中。经过主操控器处理后得到的PWM波形,输出到舵机驱动板卡完成对舵机舵面调整,然后完成对飞翔器的操控。此外,主操控器还将体系运转状况传送至上位机,经过PC机上的测控运用程序完成对操控体系监测和后期数据处理。
3 体系硬件规划
3.1 主控芯片的挑选
德州仪器(TI)公司DSP产品中TMS320F28X系列数字信号处理器内嵌32位DSP核,运算速度可达150MIPS,还具有丰厚的外设,以及较强的运算、操控和通讯才能,其在电力、轿车、航天、通讯、工业、医疗等方面得到广泛运用。本体系选用的是TI公司推出的新式浮点型数字信号操控器(TMS320F28335),具有32位单精度浮点运算单元(FPU),每秒可做300兆次浮点运算,可完成许多杂乱的操控算法。与以往的定点DSP比较,该器材的精度高,本钱低,功耗小,功用高,外设集成度高,数据以及程序存储量大,A/D转化更精确快速,功用进步50%,快速傅立叶转化(FFT)等杂乱核算算法功用提升了一倍之多。具有满意的程序和数据空间,而且外设有丰厚的接口,一个I2C总线,一个SPI口,16路12位A/D,3个SCI口等,使得体系外围电路的规划简化了,然后简化软件开发,缩短开发周期,下降开发本钱,一起有效地进步了整个体系的集成度。
3.2 舵面方位检测电路
体系操控精度是整个体系最重要的技术指标之一,体系的检测设备和输出操控元件一般决议了体系的操控精度。本体系的舵面方位检测器材挑选精细导电电位计。舵面方位检测传感器其检测的原理示意图如图3所示。线性电位器的滑动端与减速器同轴相连,一旦舵面方位发生改动,线性电位器阻值发生线性改变,其电压发生相应线性改变。
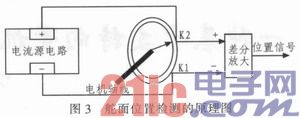
TMS320F28335具有16路ADC转化通道,采样精度为12位。但ADC输入通道的电压规模为0~3 V,因而需将舵面方位偏转信号的规模调理至0~3 V的规模内。本体系规划恒流源电路、二阶低通滤波电路、差分电路、同向扩大电路完成电压规模的调整。恒流源的规划确保了传感器取得的电流安稳,避免了因传感器电流不安稳而导致收集舵面方位数据的不精确。将收集的数据经过二阶低通滤波电路,滤除外界搅扰,添加体系的抗搅扰才能;差分电路效果是减去恒流源对传感器拉升的电压。
3.3 串行通讯接口(SCI)规划
为了确保对导航仪数据收集的精确性和实时性,所以运用RS422通讯协议收集导航仪数据。RS422的数据传输选用差分平衡传输办法,抗噪声才能前,传输间隔远,传输速度快和精度高级长处。选用SP3491芯片作为RS422的的全双工收发器,满意RS422串行协议的要求,数据传输速率可达10 Mbps(带负载)。F28335具有16位FIFO和波特率自检测功用。选用16为FIFO接纳数据,每次可接纳16位导航仪数据,进步接纳速度和精确率。
人机通讯运用RS232通讯协议,RS232是现在PC机和通讯工业运用最广泛的传信通讯接口,采纳不平衡传输办法,是为点对点通讯规划的,驱动负载为3~7千欧姆,合适本地设备之间通讯。RS232串口芯片选用MAX232串口驱动芯片,是美信(MAXIM)公司为RS232通讯串口规划的电平转化芯片,运用+5 V单电源供电。
挑选接纳中止收发形式进行通讯,DSP在中端点扫描串口中止标志位,一旦发现接纳标志方位位就取缓存数据,不然越过履行其他指令,不需占用很多CPU时刻,以及接纳数据的完好,不丢帧。当有数据要发送给上位机时,将数据写入发送缓存,发送标志方位位DSP进入中止,数据发送。
3.4 舵机操控电路规划
TMS320F28335的EPWM模块发生4路PWM信号,4路方向信号。DSP输出的是3.3 V逻辑TTL电平,因而在电路中参加74LV245芯片,一方面可避免电机驱动板对DSP芯片的反向电流,起维护主操控器的效果;另一方面此芯片还能够起到增大驱动才能的效果,使输出信号具有更大电流。从DSP输出到74LV245的信号都归于数字信号,与电机驱动板电气没有直接联络。假如直接将数字驱动信号与电机驱动板共地并作为电机驱动板的输入,则电机驱动板对主操控器作业发生搅扰,并下降体系抗搅扰才能。因而选用光耦阻隔的办法将主操控器与电机驱动板阻隔。
3.5 体系电源规划
飞翔器所带DC—DC电源模块供电电压为36 V和12 V。其间36 V为舵机体系供电:12 V是为主操控体系供电。而在主操控体系中还需求5 V、3.3 V、1.9 V电压,其间5 V为体系内部分模仿器材电源供电,3.3 V为本操控体系大部分数字芯片供电以及作为DSP外设作业电源,1.9 V为DSP内核供电。其间5 V是由12 V经过LM7805电源办理芯片转化得到的,其输出电流可抵达1 A,可满意主操控体系的需求。TMS320F2 8335(DSP)对内部模块的上电次序也有要求,首要有必要对外设模块上电,等电压安稳之后,才能对TMS320F28335的内核进行上电,不然体系将无法正常作业。选用TI公司的TPS73HD301非线性电源芯片,其长处便是5 V电压输入,3.3 V发生200 ms延时后1.9 V发生.为TMS320F28335的上电次序供给了保证,输出电流可达1A,输出功率大,驱动负载才能强,而具有短路维护及热维护等功用。
4 结束语
体系规划完成了以TMS320F28335处理器为操控中心,运用SCI串口为通讯办法,选用独立的四路EPWM输出办法,运用12位AD收集舵面方位信号的操控体系。该体系充分利用了TMS320F28335高速运算处理才能以及其丰厚的外部接口特色,简化了电路规划的难度,进步了可靠性。在硬件规划的整个过程中,体系操控器集成化,小型化,而且重视可靠性和抗搅扰才能,完成了飞翔器操控体系对硬件功用要求。






