


邦纳振荡和温度传感器分为 QM42VT1 和 QM42VT2 两种,能够用于监督电机的运转,判别其是否处于正常的振荡和温度状况,并将振荡和温度数据传送到上位机体系,搜集数据剖析趋势。
今日为我们共享这两种传感器怎样与上位机之间完成Modbus通讯。
一
QM42VT1
1. 体系建立:

2. 接线:
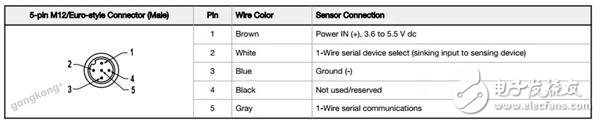
QM42VT1针脚界说:
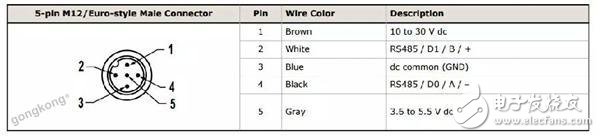
DX80无线网关(DX80G2M2S-P)针脚界说:
3. 绑定:

绑定之前留意先将Q45无线节点唤醒:
4. 收数:
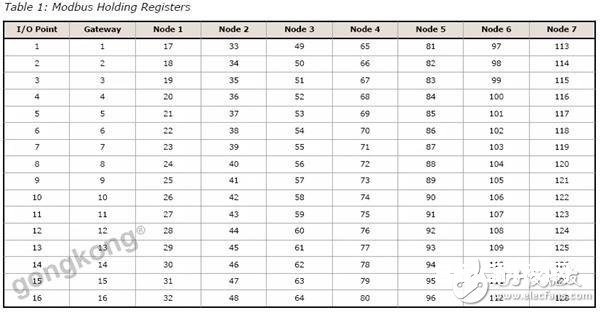
DX80G2M2S-P无线网关的寄存器地址:
QM42VT1传感器寄存器:
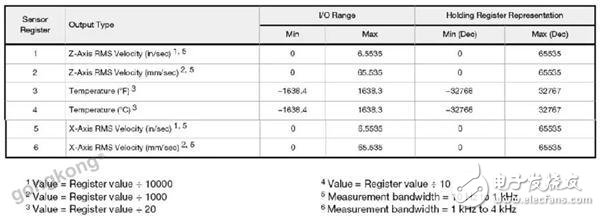
所以,假如只要一个QM42VT1,它对应的节点ID=1,那么QM42VT1的Z-AxisRMS Velocity(in/sec)对应DX80G2M2S-P无线网关的寄存器地址17,Z-Axis RMS Velocity(mm/sec)对应DX80G2M2S-P无线网关的寄存器地址18,其他对应联系依尔后推。
Modbus通讯读寄存器指令格局:
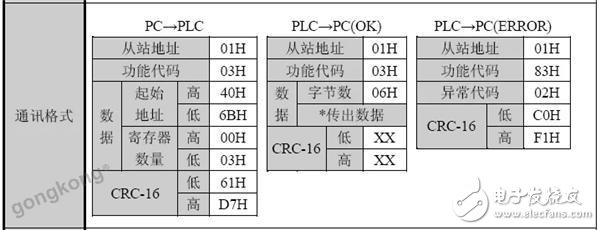
Modbus通讯读寄存器地址向前偏移一位,所以QM42VT1的Z-AxisRMS Velocity(in/sec)对应Modbus寄存器地址为16(十进制),十六进制为10,经过CRC校验计算出CRC-16的高低位。
DX80的网关上绑定节点ID=1时发送的指令:
发数:01 03 00 10 00 06C4 0D
01:从站地址;
03:功用代码;
00 10:开始地址;
00 06:寄存器数量;
C4 0D: CRC-16的高低位。
经过串口调试帮手得到回数:
回数:01 03 0C 00 2E 006C 06 25 02 06 00 47 00 B6 BD F3
01:从站地址;
03:功用代码;
0C: 回数字节数;
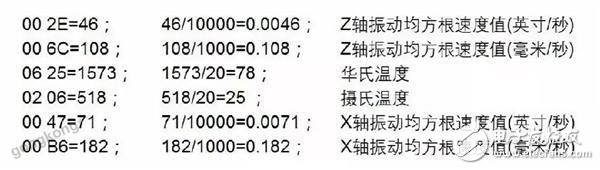
00 2E 00 6C 06 25 02 06 00 47 00 B6 :传出字节数;
BD F3:CRC-16的高低位。
对传出字节数00 2E 00 6C 06 25 02 06 00 47 00 B6结合QM42VT1传感器寄存器表进行剖析:
DX80的网关上绑定节点ID=2时发送的指令:01 03 00 20 00 06 C4 02
其他ID号对应指令可自行计算。
二
QM42VT2
1. 体系建立:
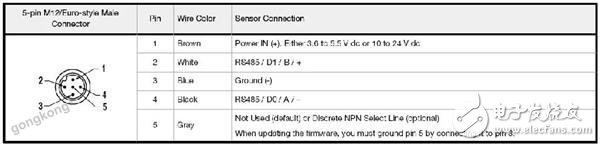
QM42VT2经过吸磁装置直接吸附在电机上,尾部出线经过RS485转串口连接到电脑上。
2. 接线:
QM42VT2针脚界说:
3. 收数:
QM42VT2传感器寄存器:
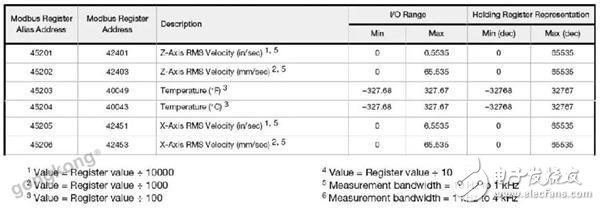
Modbus通讯读寄存器地址向前偏移一位,经过上表可知,QM42VT2的Z-AxisRMS Velocity(in/sec)对应Modbus寄存器地址为5200(十进制),十六进制为1450,经过CRC校验计算出CRC-16的高低位。
QM42VT2的ID=1的指令:
发数:01 03 14 50 00 06C0 29
经过串口调试帮手得到回数:
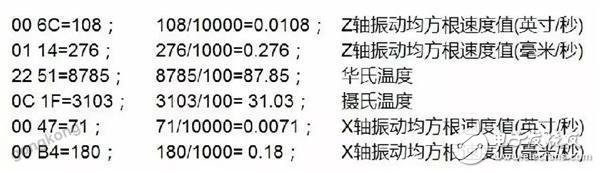
回数:01 03 0C 00 6C 01 14 22 51 0C 1F 00 47 00 B4 1A 8C
00 6C 01 14 22 51 0C 1F 00 47 00 B4:传出字节数;
QM42VT2的ID=2的指令:02 03 14 50 00 06 C0 1A
其他ID号对应指令可自行计算。






