


跟着激光技能的前进,激光传感器也成为一种新的传感器类型,它是运用激光技能进行丈量的传感器,由激光器、激光检测器和丈量电路组成。激光传感器是新式丈量外表,长处是能完结无触摸远间隔丈量,具有速度快、精度高、量程大、电搅扰能力强等长处,在许多工业范畴有着广泛的运用。
两种激光传感器首要原理和运用
运用激光的高方向性、高单色性和高亮度等特色可完结无触摸远间隔丈量。激光传感器常用于长度、间隔、振荡、速度、方位等物理量的丈量,还可用于探伤和大气污染物的监测等。总归,激光传感器的运用范畴越来越广泛了,下面介绍两种激光传感器首要原理和运用。
激光位移传感器
激光位移传感器能够运用激光的高方向性、高单色性和高亮度等特色可完结无触摸远间隔丈量。激光位移传感器(磁致弹性位移传感器)便是运用激光的这些长处制成的新式丈量外表,它的出现,使位移丈量的精度、可靠性得到极大的前进,也为非触摸位移丈量供给了有用的丈量办法。
激光位移传感器的两种丈量原理
(一)激光三角法丈量原理
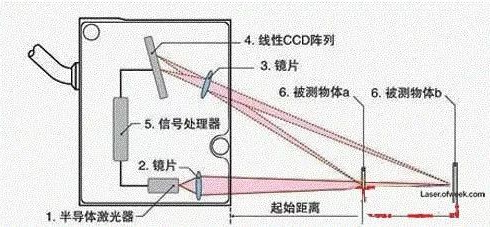
▲图1 激光三角法丈量原理图
半导体激光器1被镜片2聚集到被测物体6。反射光被镜片3搜集,投射到CCD阵列4上;信号处理器5经过三角函数核算阵列4上的光点方位得到距物体的间隔。
激光发射器经过镜头将可见赤色激光射向物体外表,经物体反射的激光经过承受器镜头,被内部的CCD线性相机承受,根据不同的间隔,CCD线性相机能够在不同的视点下“看见”这个光点。根据这个视点即知的激光和相机之间的间隔,数字信号处理器就能核算出传感器和被测物之间的间隔。
一起,光束在接纳元件的方位经过模仿和数字电路处理,并经过微处理器剖析,核算出相应的输出值,并在用户设定的模仿量窗口内,按份额输出规范数据信号。假如运用开关量输出,则在设定的窗口内导通,窗口之外截止。别的,模仿量与开关量输出可设置独立检测窗口。[2]
(二)激光回波剖析法丈量原理
激光位移传感器选用回波剖析原理来丈量间隔能够抵达必定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器、激光承受器等部分组成。激光位移传感器经过激光发射器每秒发射一百万个脉冲到检测物并回来至接纳器,处理器核算激光脉冲遇到检测物并回来接纳器所需时刻,以此核算出间隔值,该输出值是将上千次的丈量成果进行的均匀输出。[2]
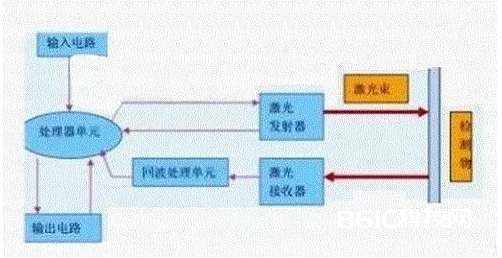
▲图2 激光回波剖析法丈量原理图
激光位移传感器的运用
(1)、尺度测定:细小零件的方位辨认;传送带上有无零件的监测;资料堆叠和掩盖的勘探;机械手方位(东西中心方位)的操控;器材状况检测;器材方位的勘探(经过小孔);液位的监测;厚度的丈量;振荡剖析;磕碰实验丈量;轿车相关实验等。
(2)、金属薄片和薄板的厚度丈量:激光传感器丈量金属薄片(薄板)的厚度。厚度的改动检出能够协助发现皱纹,小洞或许堆叠,以防止机器发作毛病。
(3)、气缸筒的丈量,一起丈量:视点,长度,内、外直径偏疼度,圆锥度,同心度以及外表概括。
(4)、长度的丈量:将丈量的组件放在指定方位的运送带上,激光传感器检测到该组件并与触发的激光扫描仪一起进行丈量,最终得到组件的长度。
(5)、均匀度的查看:在要丈量的工件运动的歪斜方向一行放几个激光传感器,直接经过一个传感器进行度量值的输出,别的也能够用一个软件核算出度量值,并根据信号或数据读出成果。
(6)、电子元件的查看:用两个激光扫描仪,将被测元件摆放在两者之间,最终经过传感器读出数据,然后检测出该元件尺度的准确度及完整性。
(7)、出产线上灌装等级的查看:激光传感器集成到灌装产品的出产制作中,当灌装产品经过传感器时,就能够检测到是否填充溢。传感器用激光束反射外表的扩展程序就能准确的辨认灌装产品填充是否合格以及产品的数量。
激光测距传感器
激光测距传感器的原理与无线雷达相同,将激光对准方针发射出去后,丈量它的往复时刻,再乘以光速既得到往复间隔。由于激光具有高方向性、高单色性和高功率等长处,这些关于测远间隔、断定方针方位、前进承受体系的性噪比、确保丈量精度等都是很要害的,因而激光测距仪日益受到重视。
激光测距传感器原理
激光测距实际上是一种自动光学勘探办法。自动光学勘探的勘探机制是:由勘探体系向方针发射波束(在光学勘探中,一般是红外或许可见光),波束被方针外表放射发生回波信号。回波信号中直接或简介地包括待测信息。接纳与信号处理体系经过接纳和剖析回波信号,取得被丈量。[3]
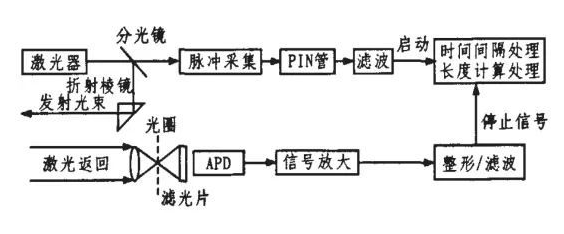
▲图3 脉冲激光测距体系简图
图3为脉冲激光测距体系简图,其作业原理如下:人机操作宣布测距指令,动身激光器宣布激光脉冲,一小部分能量透过火束片,作为参阅脉冲直接送到脉冲收集体系,作为计时的起始点,发动数字式测距计时器开端计时:另一部分由折射棱镜放射,射向方针。一般发射前端有望远光学体系,为的是削减出射光束的发散角,以前进光能面密度,增大作业间隔,还能够削减布景和周围非方针标物的搅扰。抵达方针的激光束有一部分被外表漫反射回到测距仪;经接纳物镜和光学滤波器,抵达勘探器APD,窄带光学滤波器的首要作用是充分运用激光优秀的单色性,前进体系的信噪比;光勘探器APD将光学信号转换为电信号,然后将电信号进行信号扩大、滤波整形。整形后的回波信号封闭时刻间隔处理模块,使其中止计时。这样,根据时刻间隔处理的成果t即可核算出待测方针的间隔L为:
(1)
式(1)中,c为光速。图3中,滤光片和光圈能够削减布景及杂亮光的影响,下降勘探器输出信号中的布景噪声。根据式(1),脉冲测距精度,能够表明为:
(2)
由式(2)可知,体系处理的时刻间隔精度直接决议了脉冲激光测距体系的测距精度。
激光测距传感器的运用
(1) 轿车防撞勘探器
一般来说,大多数现有轿车磕碰防备体系的激光测距传感器运用激光光束以不触摸方法用于辨认轿车在前或许在后局势的方针轿车之间的间隔,当轿车间隔小于预订安全间隔时,轿车防磕碰体系对轿车进行紧迫刹车,或许对司机宣布报警,或许归纳方针轿车速度、车距、轿车制动间隔、呼应时刻等对轿车行进进行即时的判别和呼应,能够很多的削减行车事端。在高速公路上运用,其长处愈加显着。
(2)车流量监控

▲图4 车流量监控示意图
如图4所示,这种运用方法一般固定到高速或许重要路口的龙门架上,激光发射和接纳笔直地上向下,对准一条车道的中心方位,当有车辆通行时,激光测距传感器能实时输出所测得的间隔值的相对改动值,从而描绘出所测车的概括。这种丈量方法一般运用测距规模小于30米即可,且要求激光测距速率比较高,一般要求能抵达100赫兹就能够了。这关于在重要路段监控能够抵达很好的作用,能够区别各种车型,对车身高度扫描的采样率能够抵达10厘米一个点(在40Km/h时,采样率为11厘米一个点)。对车流限高,限长,车辆分型等都能实时分辩,并能快速输出成果。
激光传感器的独特性
激光传感器可用于其它技能无法运用的场合。例如,当方针很近时,核算来自方针反射光的一般光电传感器也能完结很多的精细方位检测使命。可是,当方针间隔较远内或方针色彩改动时,一般光电传感器就难以应付了。
尽管先进的布景噪声按捺传感器和三角丈量传感器在方针色彩改动的情况下能较好地作业,可是,在方针视点不固定或方针太亮时,其功能的可猜测性变差。此外,一般光电三角丈量传感器一般量程只限于0.5m 以内。超声波传感器尽管也常常用于检测间隔较远的物体,并且由于它不是光学设备,所以不受色彩改动的影响。可是,超声波传感器是根据声速丈量间隔的,因而存在一些固有的缺陷,不能用于以下场合。
待测方针与传感器的换能器不相笔直的场合。
由于超声波检测的方针有必要处于与传感器笔直方位偏角不大于10°角以内。
需求光束直径很小的场合。由于一般超声波束在脱离传感器2m 远时直径为0.76cm。
需求可见光斑进行方位校准的场合。
多风的场合。
真空场合。
温度梯度较大的场合遥由于这种情况下会形成声速的改动。
需求快速呼应的场合
而激光传感器能处理上述一切场合的检测。
总结
近年来,咱们激光传感器技能取得了长足的前进,但同发达国家比较还有很大距离,高端的技能与产品依然依靠进口。跟着微电子技能、大规模集成电路技能、核算机技能抵达成熟期,光电子技能进入开展中期,激光传感器技能必将出现迅猛开展势头。
比较一般光源,激光传感器有许多无法代替的有点,但一起要求技能也高。大力开展激光传感器技能有利于国家在科技、经济、以及国防等多个范畴独领风骚。






