作者 刘欢1,张顺2,邹亚男3,张晓利4(辅导教师)(1.内蒙古科技大学 信息工程学院电子信息工程,内蒙古 包头
014000;2-4.内蒙古科技大学 信息工程学院主动化,内蒙古 包头 014000)
摘要:本文介绍了一种依据旋翼无人机的交通、场所标明线制作与保护的体系。这套体系能够依据预设信息完结标明线的制作,而且能够检测标明线的损耗与有效性来判别何时进行智能保护。这套体系在惯例无人机上搭建了依据Open
CV的视觉模块、喷料箱以及可替换喷头无刷水泵。视觉模块辨认到标志物后将信号传送给Cortex-M4核的XMC4700处理器,XMC4700依据预设指令将标志物的方位信息与无人机比照,匹配适宜的途径,然后将飞翔指令传送给N3飞翔操控体系。无人机跟着标志物方位的改动而改动,然后完结标明线的制作。保护形式下,放出无人机,无人机辨认路途标明线循迹飞翔,经过标明线与周围环境比照度的不同判别标明线的磨损状况,然后判别是否需求修补或从头制作。
关键词:多旋翼;无人机;标明线;自主划线;喷绘
*2017-2018年度“英飞凌杯”全国高校无人机立异规划运用大赛全国总决赛二等奖
导言
多翼飞翔器具有体积小、重量轻、灵敏度高、稳定性强的特色,适用多种空间场所,跟着无人机商场和技能的飞速开展,现在无人机的作业精度和抗干扰才能现已能履行各种杂乱环境的特种使命,减少了人作业业的劳动强度和时刻,节省了本钱,前进了作业功率。
依据多旋翼无人机的标识线制作与保护体系能够依据预设参阅点移动作业,或许将一些像篮球场、足球场等需求很多制作的规范场所信息写入无人机程序内,快速完结特定标明线的制作。跟着我国经济的高速开展,公路增加极为敏捷,因而公路车道的划线作业非常深重。现在,国内遍及选用人工划线,作业速度慢,劳动强度大,已不能满意当时形势开展的需求。所以,依据多旋翼无人机的标识线制作与保护体系也是高等级公路保护机械中急需开发的产品之一。依据这种布景,本项目经过无人机喷发的方法完结标明线制作的作业
1 无人机全体结构
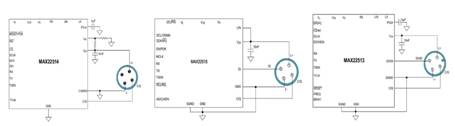
无人机的全体模型如图1所示,装备如图2所示,以依据Cortex-M4内核的英飞凌工业级单片机XMC4700为主控体系,飞翔姿势的操控选用具有API接口的大疆N3飞翔操控体系。飞翔动力方面运用了IRMCF183电调板和朗宇2212
KV880无刷电机,来保证飞翔动力和负载才能的足够。为保证无人机作业精度和飞翔的稳定性,除了N3飞翔操控体系自带的双冗余MCU以外,本项目还选用DPS310高精度气压计来进一步准确操控飞翔高度。关于一些杂乱路况下的作业使命,咱们需求考虑一些障碍物的躲避状况,对此选用了英飞凌公司的厘米级精度的测距雷达,以保证关于障碍物的及时躲避。依据多旋翼无人机的标识线制作与保护体系的中心在于图画信息的的辨认与搜集,咱们选用了依据Open
CV的边际辨认与灰度比照技能,完结对标志物间隔的检测,然后将无人机精准地引导到喷绘方位履行喷绘操作。为了保证喷绘质量,咱们选用无刷电机水泵作为喷头动力来历,经过XMC4700操控器的PWM操控通道操控IRMCF183电调板,从而抵达准确操控电机转速和喷头速度,咱们还将调配可替换喷头用来习惯不同的喷绘使命。


2 避障与报警
飞翔器装备高精度雷达模块,具有定高和避障的功用。在满意作业条件的状况下,雷达模块与测高模块的组合可猜测飞翔器间隔前方、后方的高度,使飞翔器在履行喷绘作业时坚持与作业面的相对高度不变,进行仿地飞翔,以保证喷头喷绘的均匀性。一起,雷达模块可检测最远30
m处的障碍物,并进行避障,保证作业安全。雷达功用默许敞开,避障功用在所有作业形式下均可运用。
2.1 避障功用运用
避障功用的运用分为以下两种场景:飞翔器间隔障碍物较远时,将会在间隔5 m处时才开端减速,直至间隔障碍物约2.5
m处悬停。飞翔器间隔障碍物较近时,将会当即紧迫刹车至悬停。
2.2 警报
当喷料箱中喷料或剩下电量到正告值时,无人机将中止作业并归航,依据需求设置为就地下降或许下降至记载点。
无人机喷料箱报警时,启用补给程序回来补给点补给,完结补给使命后无人机回来使命中止处持续作业。
2.3 补给点
回来补给点可经过主控的耗费报警设置或许拨动归航按键发动,归航时遥控器不能进行其他操作。
2.4 强制退出
为了应对失控或许外物侵略的状况,咱们设立了强制退出按钮,一旦呈现突发状况能够直接强制停转螺旋桨,献身无人机来防止更大的丢失。
3 作业形式与作业流程图
3.1 环境信息搜集作业形式
将无人机作业形式设置到智能飞翔形式,经过电脑设置环境信息搜集形式,挑选开阔或许关闭形式,然后调整场所大略参数,关闭形式下,直接放出无人机,无人机沿恣意方向飞至边际处(如墙体)然后沿边际飞翔并记载飞翔数据,开阔形式下依据调整后的作业半径,无人机将在飞至作业半径处进行螺旋向内飞翔,搜集环境信息。
无人机将搜集到的环境信息经过无线模块传输至电脑,然后进行场景数据的处理,最终在场景上显示出施工场所的丈量参数。

3.2 预设参数喷绘作业形式
经过无人机反应的场所数据进行工程规划,规划规划好喷绘作业使命后,将图画参数输入给PC端软件,软件里进行参数比照,将后期规划的场所与前期的搜集场所信息比照,承认无误后,将无人机作业形式设置到智能飞翔形式,以履行喷绘使命,无人机飞翔至使命开端点开端喷绘。假如电量和剩下喷料量抵达戒备值后启用补给程序,会在下一个喷绘断点处停止作业,回来补给点补给;假如没有断点处将持续进行喷绘使命,直至抵达二级警报点直接回来。完结补给使命后,无人机回来使命中止处持续作业,直至完结喷绘使命。
无人机在进行喷绘使命时,会经过视觉模块查看喷绘质量,经过调整飞翔速度、喷头速率、飞翔高度来前进喷绘质量。
3.3 智能寻迹飞翔喷绘作业形式
让无人机搜集一段施工场景的信息,反应至电脑端,用户自行挑选适宜的标志物(如路牙石)之后设定无人机与参阅物的间隔、作业范围,然后将参数指令传送给无人机,将无人机作业形式设置到智能飞翔形式履行喷绘使命,无人机飞翔至使命开端点开端喷绘,假如电量和剩下喷料量抵达戒备值后启用补给程序,会在下一个喷绘断点处停止作业回来补给点补给,假如没有断点处将持续进行喷绘使命直至抵达二级警报点直接回来。完结补给使命后无人机回来使命中止处持续作业直至完结喷绘使命。无人机将一向巡线飞翔喷绘,直至完结作业区间的飞翔喷绘使命。
3.4 全手动喷绘作业形式
全手动喷绘形式下没有主动避障功用,所以需求必定的无人机飞翔技巧才能够进行作业,此形式下会有喷料剩下量与电量剩下提示,在电量二级戒备值时无人机将主动原地下降(不主张运用到二级戒备值)。能够经过手动操作无人机进行无人机的飞翔运动,一起经过喷口操控开关和喷头速率旋钮来进行操控喷绘作业。
4 赛后感言
阅历了一年的竞赛在2018年8月1日画上了句号,这篇文章也算是咱们对所做项目的一个总结。2017年9月,因机缘巧合加入了这场竞赛,曾经从来没有触摸过无人机的咱们在拿到英飞凌公司供给的器材时可谓是一脸茫然,做什么?怎么做?脑子里产生了一连串的问号,各种百度、各种玩家DIY经历,都被咱们当作是一本教科书。渐渐了解,点滴前进,有道是“失利是成功之母”,在炸机无数次、无数次试飞失利、无数次改正后,功夫不负有心人,一步步从初赛、复赛,迈入了决赛的大门。在这期间非常感谢英飞凌公司的各种协助,假如没有英飞凌工程师的倾慕相助,或许咱们会走更多的弯路。心存期望,美好就会来临你;心存愿望,机会就会笼罩你;心存感恩,贵人就会喜爱你。
参阅文献
[1]Rafael C.Gonzalez. Digital Image Processing (2nd Edition),2003.
[2]OpenCV-Python官方教程中文版,2014.
[3]新版路途交通标志和标线实用手册.
本文来历于科技期刊《电子产品世界》2019年第2期第71页,欢迎您写论文时引证,并注明出处