导言
开始并没有适用于混合形式变送器和网络运用处理器(NCAP)的数字通讯接口规范。每家变送器制作商都界说有自己的接口。所以,一家变送器厂商的产品不或许支撑一切操控网络。为处理这一问题,IEEE仪器和丈量协会的传感器技能委员会建议一项建议,为传感器、执行器、混合形式通讯协议和传感器电子数据表(TEDS)格局创立智能变送器接口规范。这项建议促成了IEEE 1451.4-2004,已被归入美国国家规范(ANSI)。
该规范的首要方针包含:
完成传感器的即插即用,经过公共传感器通讯接口完成。
支撑并简化智能变送器的创立。
简化丈量仪器体系的设置和保护。
以最少的存储器容量完成智能变送器的布置。
规范论述了以下内容:
变送器,包含混合形式接口(MMI)和变送器电子数据表(TEDS)。
MMI,用于存取TEDS。
TEDS,驻留于变送器内部的存储芯片。
阐明TEDS数据结构的模板。
模板描绘言语(TDL)。
称为变送器模块的软件目标,经过TDL拜访TEDS,并对其进行解码和编码。
满意IEEE 1451.4规范的变送器可经过TEDS供给本身阐明。本运用笔记评论了用于拜访TEDS的NCAP (数据收集体系)数字驱动器电路。
IEEE 1451.4混合形式接口(MMI)
IEEE 1451.4 MMI用于衔接变送器和NCAP或数据收集体系(DAS)之间的模仿信号和TEDS。IEEE 1451.4规范界说了两类MMI。Class 1中,TEDS与模仿功用共用一根线,选用负压通讯。Class 2供给TEDS独立线对通讯,选用正压通讯。因而,依照用笔记4206:“为嵌入式运用挑选适宜的1-Wire®主机”一文的阐明,Class 2与Maxim的1-Wire驱动器(主控)相吻合。因为Class 1选用负压通讯,需求愈加杂乱的驱动电路。
在Class 1中,有三种MMI版别,别离选用2线、3线或4线与变送器或TEDS通讯。这些接口的共性是模仿和数字功用共用一条线。共用连线可所以信号线、电源线或回来通道。
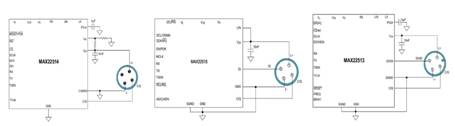
图1所示为典型的2线恒流供电传感器,共用信号线。经过回转信号线的极性,二极管答应次序拜访放大器或TEDS存储器。当操控开关处于“analog”方位时,DAS的正电流源经过信号线和上方的二极管为放大器供电。变送器输出在信号线上表现为模仿电压。当操控开关处于“digital”方位时,存储器材由负逻辑电源经过下方的二极管供电。电路中给出了在TEDS存储器芯片端子之间的下拉电阻(Rt)。该电阻用于开释存储器电路和引线电容的电荷,保证逻辑0电平满意时隙要求。
 图1. IEEE 1451.4 Class 1 MMI,共用信号线。
图1. IEEE 1451.4 Class 1 MMI,共用信号线。
图2所示为3线电压供电传感器的方框图,共用电源线。信号线专用于将变送器的模仿输出电压传送到DAS。经过回转电源线极性,二极管答应次序拜访放大器或TEDS存储器。当操控开关处于“analog”方位时,DAS电源的正电源经过上方的二极管为放大器供电。当操控开关处于“digital”方位时,存储器器材由负逻辑电源经过下方的二极管供电。
图2. IEEE 1451.4 Class 1 MMI,共用电源线。
图3增加了另一条线,构成4线电压供电传感器,共用回来线(一般为接地通路)或屏蔽线。传感器和TEDS存储器具有独立的电源,可一起作业。仍然需求挑选模仿和数字形式的开关,以便在运用传感器时禁用数字功用。这有助于下降共用回路压降引起的模仿信号和数字TEDS数据之间的彼此搅扰噪声。这种装备下并不需求二极管和Rt。电阻能够省掉,二极管可用短路线替代。
图3. IEEE 1451.4 Class 1 MMI,共用回来线。
TEDS存储器
DS2430A 256位1-Wire EEPROM是典型的TEDS存储芯片。因为该芯片没有VCC引脚(即选用寄生供电),只需求两个引脚:IO和GND。IEEE规范第8.1.2章的方框图未提及这些引脚称号,而是用“+”表明IO,“-”表明GND。图4所示为IEEE 1451.4兼容传感器的数字部分,选用实践类型和引脚称号。规范(第8.5章,宗族码)未对TEDS存储器规则专用的宗族码。因而,答应运用DS2430A之外的2引脚1-Wire存储器芯片。通用二极管1N4148可用肖特基二极管替代,其正向偏压大约为0.3V。Rt电阻值不是特别要害,电路选用100kΩ测验。
图4. Class 1传感器,TEDS作业原理。
构建Class 1 MMI数字驱动器电路
1-Wire器材作业信号电平在闲暇情况为3V至5V (上拉电压),有用情况为0V。该电压是IO端(正端)与GND端(负端)之间的电压。Class 1 MMI将IO引脚衔接至0V,并调制存储器芯片GND引脚的负压(图5)。与标称1-Wire信号电平比较,MMI信号反相,向负向平移5V。
图5. 标称1-Wire与Class 1 MMI信号电平
存储器芯片不能区分、也不关心其端子电压怎么发生。应对时,仅仅在其端口按规则的时刻效果一个短路信号。“惯例情况”下,这种短路信号在IO口观测到仅仅一个挨近0V的电压。关于Class 1 MMI,短路形成数字通讯线上的电压从-5V (闲暇)升高至二极管压降-VF (-0.7V)。
MMI驱动器阐明
图6所示为MMI驱动器电路。电路由正向通路(顶部,主控至传感器,写)和回来通路(底部,传感器至主控,读)组成。IEEE 1451.4兼容传感器经过模仿/数字开关衔接至TP4。回来通路衔接至驱动器的0V (GND)。TP2和TP6处的信号电平对应于标称1-Wire电平(闲暇情况为5V,有用信号电平为0V)。V+对应于微操控器的作业电压,规模为3V至5V。TP2衔接至微操控器的开漏输出(写),TP6衔接至一个输入端口。
图6. 带有传感器的Class 1 MMI数字驱动器衔接双向1-Wire主控器材
衔接双向主控器材需求图7所示附加电路。因为电平转化部分的上升和下降沿传输延时不同,当作业电压太高时,选用双向1-Wire主控器材的MMI驱动器或许不安稳。考虑到这一原因,正电源需求约束在大约3.3V。因而,双向主控器材有必要为3V供电器材,例如DS2482。运用5V双向主控器材(例如DS2480B),会导致模仿开关的COM和NO电压超越V+电平,不符合所要求的作业条件。
图7. 双向1-Wire主控器材接口的附加电路
验证
图6所示电路选用图7所示附加电路进行测验。1-Wire主控器材为DS9097U-S09,它根据DS2480B驱动器芯片。为保证安稳,正电压(V+)设置为3.4V。1-Wire主控作业在5V,不符合MAX4561模仿开关的电压要求(信号电压不得高于供电电压)。这解说了TP2上的搅扰,但对电路功用没有其它晦气影响。
复位/在线检测周期
图8所示为TP2 (顶部)、TP4 (中心)和TP6 (底部)信号。因为传感器网络中存在二极管,当从器材应对脉冲有用时,不能彻底到达0V电平。底部波形显现了明晰的应对脉冲。TP6处的正向幅值对应于V+ 3.4V。
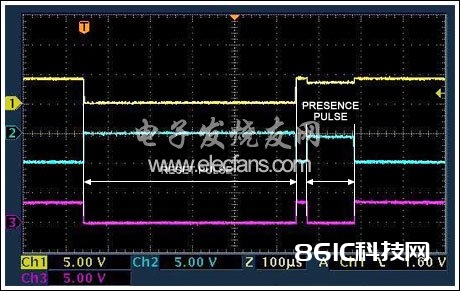
图8. 复位/在线检测
读时隙
图9所示的节点与之前相同(TP2 = 顶部,TP4 = 中心,TP6 = 底部)。第一个时隙读1,第二个时隙读0。
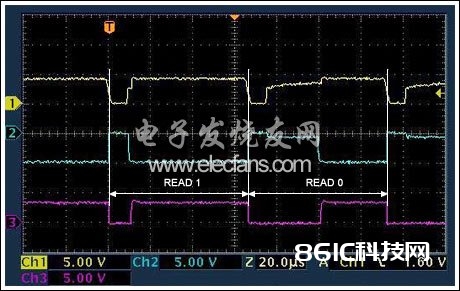
图9. 通讯时隙
总结
当微操控器作为1-Wire主控,选用独立的端口进行读、写操作时,能够选用本文介绍的电路。可是,发生时隙和复位/在线检测信号的运用软件具有严厉的守时要求,或许有必要选用汇编言语编程。运用双向1-Wire驱动器芯片的附加电路,答应运用高档言语开发运用软件。
因为其异步作业方式,当主控中止拉低1-Wire总线时,附加电路会引起尖峰脉冲。读0时,尖峰脉冲触发驱动器的有源上拉,形成驱动器上拉和MAX4561下拉之间的抵触。因而,当运用DS2482驱动器时,应该封闭有源上拉。尖峰脉冲也是双向1-Wire驱动器附加电路不能支撑主控侧1-Wire从器材的原因。