跟着现代电机技能、现代电力电子技能、微电子技能、永磁资料技能、沟通可调速技能及操控技能等支撑技能的快速开展,使得永磁沟通伺服技能有着长足的开展。永磁沟通伺服体系的功用日渐进步,价格趋于合理,使得永磁沟通伺服体系替代直流伺服体系尤其是在高精度、高功用要求的伺服驱动范畴成了现代电伺服驱动体系的一个开展趋势。永磁沟通伺服体系具有以劣等长处:
电动机无电刷和换向器,作业牢靠,维护和保养简略;
定子绕组散热快;
惯量小,易进步体系的快速性;
适应于高速大力矩作业状况;
相同功率下,体积和重量较小,广泛的应用于机床、机械设备、转移组织、印刷设备、安装机器人、加工机械、高速卷绕机、纺织机械等场合,满意了传动范畴的开展需求。
永磁沟通伺服体系的驱动器阅历了模仿式、形式混合式的开展后,现在现已进入了全数字的年代。全数字伺服驱动器不只克服了模仿式伺服的分散性大、零漂、低牢靠性等确认,还充分发挥了数字操控在操控精度上的优势和操控办法的灵敏,使伺服驱动器不只结构简略,并且功用愈加的牢靠。现在,高功用的伺服体系,大多数选用永磁沟通伺服体系其间包含永磁同步沟通伺服电动机和全数字沟通永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和操控算法。操控算法是决议沟通伺服体系功用好坏的关键技能之一,是国外沟通伺服技能封闭的首要部分,也是在技能独占的中心。
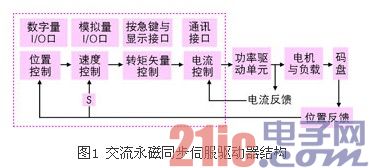
沟通永磁伺服体系的根本结构
沟通永磁同步伺服驱动器首要有伺服操控单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反应检测器材组成,其结构组成如图1所示。其间伺服操控单元包含方位操控器、速度操控器、转矩和电流操控器等等。咱们的沟通永磁同步驱动器其集先进的操控技能和操控策略为一体,使其十分适用于高精度、高功用要求的伺服驱动范畴,还表现了强壮的智能化、柔性化是传统的驱动体系所不行比较的。
现在干流的伺服驱动器均选用数字信号处理器(dsp)作为操控中心,其长处是能够完成比较杂乱的操控算法,事项数字化、网络化和智能化。功率器材遍及选用以智能功率模块(ipm)为中心规划的驱动电路,ipm内部集成了驱动电路,一起具有过电压、过电流、过热、欠压等毛病检测维护电路,在主回路中还参加软发动电路,以减小发动进程对驱动器的冲击。
伺服驱动器大体能够划分为功用比较独立的功率板和操控板两个模块。如图2所示功率板(驱动板)是强电部,分其间包含两个单元,一是功率驱动单元ipm用于电机的驱动,二是开关电源单元为整个体系供给数字和模仿电源。
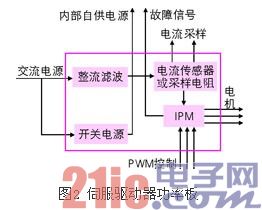
操控板是弱电部分,是电机的操控中心也是伺服驱动器技能中心操控算法的运转载体。操控板经过相应的算法输出pwm信号,作为驱动电路的驱动信号,来改逆变器的输出功率,以到达操控三相永磁式同步沟通伺服电机的意图。
功率驱动单元
功率驱动单元首要经过三相全桥整流电路对输入的三相电或许市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再经过三相正弦pwm电压型变频器来驱动三相永磁式同步沟通伺服电机。功率驱动单元的整个进程能够简略的说便是ac-dc-ac的进程。整流单元(ac-dc)首要的拓扑电路是三相全桥不控整流电路。
逆变部分(dc-ac)选用选用的功率器材集驱动电路,维护电路和功率开关于一体的智能功率模块(ipm),首要拓扑结构是选用了三相逆变电路原理图见图3,利用了脉宽调制技能即pwm(pulse width modulation)经过改动功率晶体管替换导通的时刻来改动逆变器输出波形的频率,改动每半周期内晶体管的通断时刻比,也便是说经过改动脉冲宽度来改动逆变器输出电压副值的巨细以到达调理功率的意图。
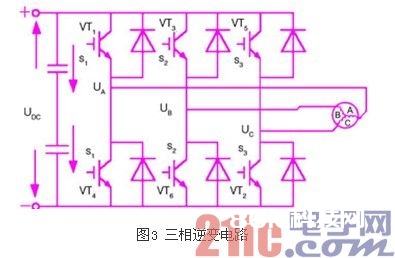
图3中vt1~vt6是六个功率开关管,s1、s2、s3别离代表3个桥臂。对各桥臂的开关状况做以下规则:当上桥臂开关管“开”状况时(此刻下桥臂开关管必定是“关”状况),开关状况为1;当下桥臂开关管“开”状况时(此刻下桥臂开关管必定是“关”状况),开关状况为0。三个桥臂只要“0”和“1”两种状况,因而s1、s2、s3构成000、001、010、011、100、101、111共八种开关管形式,其间000和111开关形式使逆变输出电压为零,所以称这种开关形式为零状况。输出的线电压为uab、ubc、uca,相电压为ua、ub、uc,其间udc为直流电源电压,依据以上可得到附表剖析。

操控单元
操控单元是整个沟通伺服体系的中心,完成体系方位操控、速度操控、转矩和电流操控器。所选用的数字信号处理器(dsp)除具有快速的数据处理才能外,还集成了丰厚的用于电机操控的专用%&&&&&%,如a/d转换器、pwm发生器、守时计数器电路、异步通讯电路、can总线收发器以及高速的可编程静态ram和大容量的程序存储器等。伺服驱动器经过选用磁场定向的操控原理(foc) 和坐标改换,完成矢量操控(vc),一起结合正弦波脉宽调制(spwm)操控形式对电机进行操控。永磁同步电动机的矢量操控一般经过检测或估量电机转子磁通的方位及幅值来操控定子电流或电压,这样,电机的转矩便只和磁通、电流有关,与直流电机的操控办法类似,能够得到很高的操控功用。关于永磁同步电机,转子磁通方位与转子机械方位相同,这样经过检测转子的实践方位就能够得知电机转子的磁通方位,从而使永磁同步电机的矢量操控比起异步电机的矢量操控有所简化。
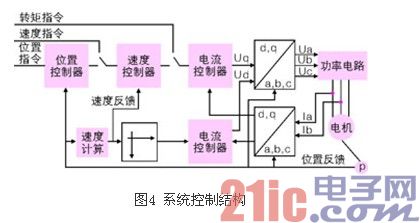
伺服驱动器操控沟通永磁伺服电机(pmsm)伺服驱动器在操控沟通永磁伺服电机时,可别离作业在电流(转矩)、速度、方位操控方法下。体系的操控结构框图如图4所示因为沟通永磁伺服电机(pmsm)选用的是永久磁铁励磁,其磁场能够视为是稳定;一起沟通永磁伺服电机的电机转速便是同步转速,即其转差为零。这些条件使得沟通伺服驱动器在驱动沟通永磁伺服电机时的数学模型的杂乱程度得以大大的下降。从图4能够看出,体系是根据丈量电机的两相电流反应(ia、ib)和电机方位。将测得的相电流(ia、ib)结合方位信息,经坐标改变(从a,b,c坐标系转换到转子d,q坐标系),得到id、iq重量,别离进入各自得电流调理器。电流调理器的输出经过反向坐标改变(从d,q坐标系转换到a,b,c坐标系),得到三相电压指令。操控芯片经过这三相电压指令,经过反向、延时后,得到6路pwm波输出到功率器材,操控电机运转。体系在不同指令输入方法下,指令和反应经过相应的操控调理器,得到下一级的参阅指令。在电流环中,d,q轴的转矩电流重量(iq)是速度操控调理器的输出或外部给定。而一般情况下,磁通重量为零(id=0),可是当速度大于限定值时,能够经过弱磁(id《0),得到更高的速度值。
从a,b,c坐标系转换到d,q坐标系有克拉克(clarke)和帕克(park)改换来是完成;从d,q坐标系转换到a,b,c坐标系是有克拉克和帕克的逆改换来是完成的。
结语
本文简略的介绍了伺服驱动器的几个首要的功用模块的完成及原理,谨协助我们对伺服驱动器有进一步了解之用,我们假如想更深化的了解伺服驱动器的规划原理,请参阅其它的文献。