力觉传感器分类
所谓力觉是指机器人作业进程中对来自外部的力的感知,它和压觉不同,压觉力是笔直于力触摸外表的力、三维力和三维力矩的感知。机器人力觉传感器是仿照人类四肢关节功用的机器人取得实践操作时的大部分力信息的设备,是机器人自动和婉操控必不可少的,它直接影响着机器人的力操控功能。分辩率、灵敏度和线性度高,可靠性好,抗搅扰能力强是机器人力觉传感器的首要功能要求。就传感器装置部位丽言,力觉传感器可分为腕力传感器、关节力传感器、握力传感器、脚力传感器、手指力觉传感器等。
手段传感器
手段传感器是一个两头别离与机器人腕部和手爪相联接的力觉传感器。当机械手夹住工件进行操作时,经过手段传感器能够输出六维(三维力和三维力矩)重量反馈给机器人操控体系,以操控或调理机械手的运动,完结所要求的作业。手段传感器分为问接输出型和直接输出型两种。直接输出型手段传感器灵敏体自身的结构比较简略,但需对传感器进行校准,要经过杂乱的核算求出传递矩阵系数,使用时进行矩阵运算后才干提取出六维重量。直接型手段传感器灵敏体自身的结构比较杂乱,但只需求经过简略的核算就能提取出6个重量,有的乃至能够直接得到6个重量。
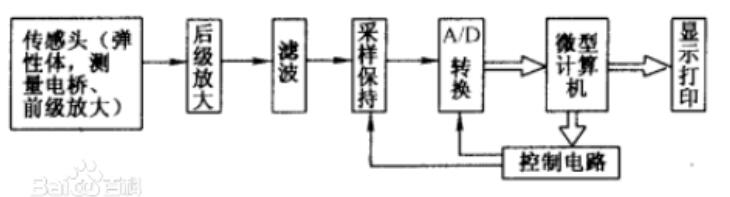
手段传感器的体系硬件一般由传感器和信息处理两部分组成。传感器部分由弹性体、丈量电桥和前级扩大器组成,首要完结灵敏六维重量,并进行信号前级扩大的使命。信号处理部分包含后级扩大、滤波、信号采样坚持、A/D转化以及进行体系操控、核算和通讯的微机体系,整个体系框图如图所示。
手段传感器体系软件一般包含数据收集和A/D转化操控软件、非线性校正和矩阵解耦运算软件、体系通讯及输出软件等。
手段传感器的优缺点:
①手段传感器尽管结构较杂乱,但原理比较相似,一般都是经过应变片来丈量内部弹性体的变形,再解耦求得多维力信号。
②手段传感器取得的力信息较多(如六维手段传感器),分辩率、灵敏度和精度高,可靠性好和使用便利。
③手段传感器对不同类型的机器人能完成通用化,所以得到广泛的使用。
④弹性元件一般为全体结构,加工极为困难。
⑤应变片张贴进程杂乱,应变片的输出信号较弱,需求高功能的扩大器,市场上供给的扩大器体积较大。
⑥从手段传感器的作业原理能够看出,手段传感器作业时发作的变形必将影响机器人操作臂的定位精度。
⑦因为传感器规划、制造上的原因,使得传感器的输出信号与实践六维向量的分力之间存在彼此耦合效果,即传感器的彼此搅扰,这种搅扰非常杂乱,难以从理论上进行剖析宽和耦消除,一般需求选用试验办法进行标定。
握力传感器
光纤握力觉传感器单元如图所示,所用的光纤是50μm、125μm的多模光纤,波纹板是由两块彼此啮合的V形槽板组成,为了坚持平衡,在槽的另一端放置一根不通光的虚设光纤,板的厚度为3mm。当物体压力效果于握力觉传感器时,波纹板的上盖相对于下盖位移,使光纤发作变形,经过丈量光信号的衰减可直接得知压力的巨细。在规划、制造之后,对体系功能进行测验。丈量成果规模大、灵敏度高、效果杰出。力的分辩率为59,丈量规模为0~2500g。体系作为一独立的部分,经过串行口与操控微机相连,接口简略便利。
脚力传感器
二足步行机器人在人类日子的环境中使用较为便利,但不安稳,操控较杂乱。为了解步行时的状况,需装各种传感器,其间脚力传感器是与外界触摸的传感器,对步行操控来说是适当重要的。
圆筒式脚力传感器,其简图及装配图如图所示。脚力传感器圆筒的资料是聚氯乙烯树脂,圆筒外径为26mm,内径为20mm,长度为15mm。其上部两处与脚的上外表板固定,下部两处与脚的下外表板固定。圆筒左右侧壁的表里外表贴应变片4片,经过桥式扩大输出反映笔直负荷。依据两头支承梁式脚力传感器的输出特性可知,脚前部传感器与后部传感器之间的彼此影响明显。因而,为了削弱其彼此影响,圆筒式脚力传感器的脚前部传感器与脚后部传感器的下外表板不相连。圆筒式脚力传感器的上外表板为铝板,下外表板为丙烯板。为了削减脚底与地上之间的滑动,在丙烯板外表上贴一层橡胶。两足步行机器人的总重量为18.5kg时,每只脚上装有4个传感器,两只脚共8个传感器。
手指式力传感器
手指式力传感器,一般经过应变片或压阻灵敏元件丈量多维力而发作输出信号,常用于小规模作业,如灵活手抓鸡蛋等试验,精度高、可靠性好,逐渐成为力操控研讨的一个重要方向,但多指和谐杂乱。
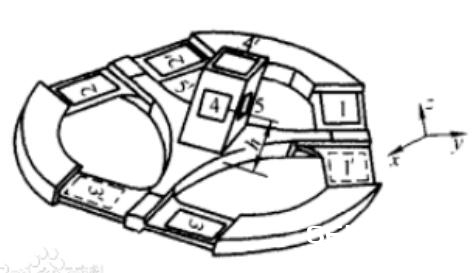
传感器弹性体结构如图所示,是组合式结构,分上、下两个部分:上部是中空正方形的四个旁边面贴有应变片4和4ˊ、5和5ˊ。当薄壁筒有微应变时,应变片能够丈量效果力矩Mx、My、Mz。传感器弹性体的下部是圆环形,圆环形上面有对称的三个矩形弹性梁,弹性梁的双面别离贴有应变片,共有6个应变片组成3组桥路,环上其他高出部分的厚度与梁高比较大,当弹性梁发作微应变时,三个高出来的部分不发作变形,适当于基座。当传感器受外力效果时,应变梁发作变形,可依据桥路输出值丈量力和力矩。上部分与下部分经过三个桥梁相连,这中问部分能够看成是刚体,受力不发作变形。传感器的输出重量有耦合,经过对其进行标定树立解耦矩阵进行解耦。机器人手指五维力/力矩传感器,外壳是手指顶部并有衔接接口,过载维护避免外力冲击而使传感器弹性体发作塑性变形。传感器外径为21mm,高度为17.5mm,最大力为10N,最大力矩为0.2N·m。传感器底座上能够装置插座,引线便利,安全可靠。为削减长线传输发作噪声,将传感器扩大电路装置在传感器内部,构成集成度高的传感器。
力觉传感器挑选
在使用应变片的力觉传感器中,应变片的好坏与传感器的结构相同重要,乃至比结构更为重要。多轴力觉传感器的应变片检测部分应该具有以下特性:
(1)至少能获取6个以上独立的应变丈量数据;
(2)由黏结剂或涂料引起的滞后现象或输出的非线性现象尽量小;
(3)不易受温度和湿度影响。
选用力传感器时,首先要特别留意额定值。人们往往只留意效果力的巨细,而简单忽视效果力到传感器基准点的横向间隔,即忽视效果力矩的巨细。一般传感器力矩定值的裕量比力额定值的裕量小。因而,尽管操控对象是力,但是在重视力的额定值的一起,千万不要忘掉查看力矩的额定值。
其次,在机器人一般的力操控中,力的精度含义不大,重要的是分辩率。为了完成滑润操控,力觉信号的分辩率非常重要。高分辩和高精度并非是一致的,在机器人负载丈量中,一定要辨明分辩率和丈量精度终究哪一个更重要。