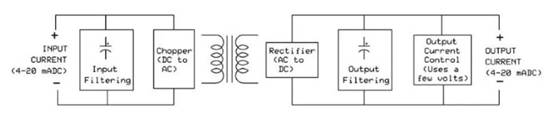
跟着社会自动化程度的进步,人机交互才能急需大的改变,向着更便利运用、更直观的方向开展。激光医治机首要运用激光的物理特性效果于人体,发生机体化学反应然后到达医治疾病的目的。激光医治机作为一种精密仪器需求准确的操控及防尘、防静电、防潮等方面的严格要求。激光医治机输入设备选用接触屏操控,既是依据以上要求也是从便利运用者操作和界面直观的视点考虑的。接触屏的运用使得数据的显现和数据的输入结合为一体,简化了整个设备。
1 接触屏原理
接触屏附着在显现器的外表,与显现器合作运用。经过接触发生模仿电信号,经过转换为数字信号由微处理器核算得出接触点的坐标,然后得到操作者的目的并履行。接触屏按其技能原理可分为五类:矢量压力传感式、电阻式、电容式、红外线式和外表声波式,其间电阻式接触屏在实践运用顶用的较多。电阻式接触屏由4层的通明薄构成,最下面是玻璃或有机玻璃构成的底层,最上面是一层外外表经过硬化处理然后润滑防刮的塑料层,附着在上下两层内外表的两层为金属导电层(OTI,氧化铟),这两层由细微的通明阻隔点进行绝缘。当手指接触屏幕时,两导电层在接触点处接触。
接触屏的两个金属导电层别离用来丈量X轴和Y轴方向的坐标。用于X坐标丈量的导电层从左右两头引出两个电极,记为X+和X-。用于Y坐标丈量的导电层从上下两头引出两个电极,记为Y+和Y-。这便是四线电阻接触屏的引线构成。当在一对电极上施加电压时,在该导电层上就会构成均匀接连的电压散布。若在X方向的电极对上施加一确认的电压,而Y方向电极对上不加电压时,在X平行电压场中,触点处的电压值可以在Y+(或Y-)电极上反映出来,经过丈量Y+电极对地的电压巨细,便可得知触点的X坐标值。同理,当在Y电极对上加电压,而X电极对上不加电压时,经过丈量X+电极的电压,便可得知触点的Y坐标。丈量原理如图1所示。
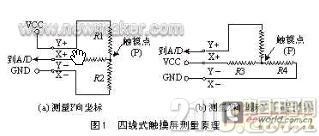
五线式接触屏与四线式不同。首要差异在于五线接触屏将其间一导电层的四端均引出来作为四个电极,另一导电层只是作为丈量的导体输出X向和Y向的电压,丈量时要替换在X向和Y向上施加电压。
2 接触屏操控器作业原理
接触屏操控器有多种,首要的功用均是在微处理器的操控下向接触屏的两个方向分时施加电压,并将相应的电压信号传送给本身A/D转换器,在微处理器SPI口供给的同步时钟效果下将数字信号读入微处理器。操控器ADS7846根本结构如图2所示。
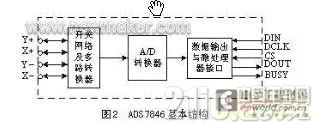
图1接触点P处丈量成果核算如下:

ADS7846内部可以经过寄存器的设置将A/D转换器的分辨率设为8位或12位,在本体系中A/D转换器的分辨率取12位。则P点的二进制输出代码为:
其间: 为加在ADS7846内部A/D转换器上的参阅电压。
接触屏操控器的运转是经过串行数据输进口DIN输入操控指令进行操控的。

bit7指明发送指令开端,高电平有用。A2:A0用于挑选数据输入通道,101挑选X坐标丈量,001挑选Y坐标丈量。MODE将内部模数转换器的分辨率界说为8位(MODE=1)或12位(MODE=0)。SER/DFR为单端/双端参阅电压挑选位。PD1:PD0依据省电形式的需求进行挑选设置。这些指令操控位的设置将在程序代码部分得以运用。
3 体系硬件规划
激光医治机的输入体系由三部分组成:接触屏、接触屏操控器和微操控器。微操控器选用Microchip公司的新式芯片PIC16F876。内部总线选用哈佛双总线结构。在内部频率相同的情况下,加快了数据的传输速度,避免了瓶颈现象。此芯片选用精简指令集(RISC)易于运用,加快了开发速度。内部含有8KB程序存储器(分页操作),256字节EEPROM,368字节RAM,8路模数转换器,1个通用串行口(SCI),1个I2C接口,1个串行外围接口(SPI),3个定时器及看门狗电路(WathcDog)等许多重要资源。外围许多接口功用上的复用使得整个微操控器简练,功用强大。
依据ADS7846与微操控器进行数据交换的接口特征,选用PIC16F876的SPI口。SPI口包含三个信号:SDO(串行数据输出),SDI(串行数据输入),SCK(串行同步时钟)。硬件衔接联系见图3。
本文侧重于激光医治仪输入体系的规划,其它硬件的规划仅给出接口的意义。因为PIC16F876的内部集成度较高,所以外围接口适当简略,可是要完结杂乱的操控功用有必要进行内部寄存器的设置。
4 软件规划
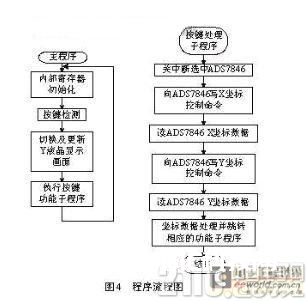
依照以上规划思维规划了运用软件。图4为主程序与接触屏输入检测部分的程序流程图。其间,坐标数据处理一般选用查表的办法,将用户指令的坐标构成数据表,使用取得的坐标信息进行改换快速查表,然后进步软件的运转速度。
下面是PIC16F876同ADS7846接口的部分程序代码。
CMDATA EQU 30H
XDATA_H EQU 31H
XDATA_L EQU 32H
YDATA_H EQU 33H
YDATA_L EQU 34H
;初始化寄存器
MOVLW 02H
MOVWF TRICB ;界说B口方向
MOVLW 90H
:2003-09-10)MOVWF TRISC ;界说C口方向
BCF SSPCON, 5
MOVLW 10H
MOVWF SSPCON ;初始化SSPCON
BSF SSPCON, 5 ;发动SPI
;获取X,Y坐标
GetXY
BCF PORTB, 0 ;选中ADS7846
MOVLW 0D4H ;获取X坐标指令
MOVWF SSPBUF ;发送指令
BUSY
BTFSC PORTB, 1 ;判忙?
GOTO BUSY
MOVF SSPBUF, W ;12位数据
MOVWF XDATA_H ;XDATA_H存放高字节
MOVF SSPBUF, W
MOVWF XDATA_L ;XDATA_L 存放低字节
…………………………… ;Y坐标数据相同处理
RETLW 0
结 语
本体系的规划使得输入极端便利,并且外围设备得到简化,在实践运用中进步了人机交互的才能,收到杰出的社会效益。体系规划的思维不只可以运用在医疗职业,并且可以运用在工业生产自动化以及手持设备等各职业。