0 导言
矢量操控变频调速体系现已进入实用阶段。众所周知,矢量操控体系功能的好坏,很大程度上依赖于电机参数辨识的准确与否,因而准确取得这些参数是矢量操控体系的关键问题。一般来说感应电机参数辨识分为离线自提交和在线自校对。电机参数的在线自校对需求体系已整定好以及准确的速度信息,其办法主要有卡尔曼滤波、模型参阅自适应和最小方差估量器等。参数离线自提交得到的电机参数的初始值,用于在线自校对算法中,可进步算法的收敛速度。因而国内外许多学者对此做了许多有意义的作业,主要有以下几种办法:
1)空载实验和堵转实验法[1];
2)对电机的三相输入侧施加不同的鼓励,使用电机自身的空载和堵转等效电路进行参数自提交[2~5];
3)使用最小二乘法进行参数自检测[6、7];
4)使用过渡进程呼应波形进行自提交[8]。
在假定感应电机三相平衡的前提下,提出一种简易的高精度异步电机参数离线辨识办法,使用电机学原理,一起对逆变器及电机中的导通压降、开关推迟、死区时刻和集肤效应等要素进行合理 的补偿,以确保辨识的参数具有较高的精度和可信度。该办法包含4个辨识子进程:定子电阻辨识、定转子漏感辨识、转子电阻辨识以及互感的辨识。整个进程可主动完结,不需求进行杂乱的堵转实验。
1 参数辨识原理
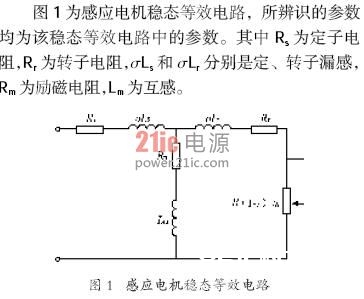
1.1 定子电阻辨识
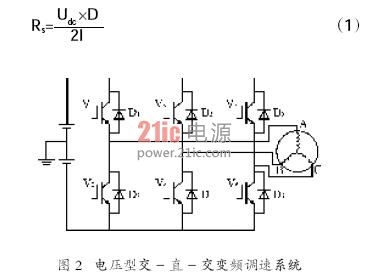
假定感应电机三相平衡,则只需求检测其单相电路的定子电阻。如图2所示为电压型交-直-交变频调速体系的主电路,使V1一向导通,V2、V3、V5、V6一向关断,而V4 由脉冲序列驱动,则在A、B 两相绕阻大将发生一组电压脉冲序列。设时钟周期为Ts,脉冲宽度为t,则脉冲的占空比D=t/Ts,绕阻上的电压平均值则为Udc伊D,这样就得到一个等效的直流电压,A、B两相一起流过的电流为I,相应的辨识定子电阻值为
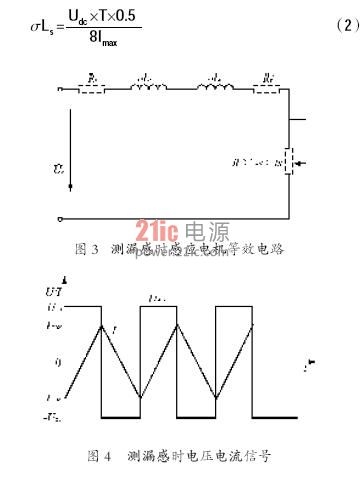
1.2 定转子漏感辨识
依据电机的电磁物理特性,能够假定定转子的漏感是持平的。如图3所示,当进行电机漏感测验时,因为向电机注入的是高频脉冲信号(1 kHz 左右),只需频率足够高,等效电路中的电阻项就能够疏忽。对电机进行单相测验,A、B两相一起进行,为了减小疏忽定、转子电阻所带来的影响,能够使定子电流的最大值与最小值的巨细持平而极性相反,即在测定漏感的时刻距离内,使电流的平均值为零。如图2中所示,V5和V6在测验A、B侧的漏感时一直为关断。当UAB=+Udc时,使V1和V4一起导通,V2 和V3处于关断状况;当UAB= -Udc时,使V2和V3一起导通,V1和V4处于关断状况, 电压电流波形如图4 所示。核算漏感的公式为
1.3 转子电阻辨识
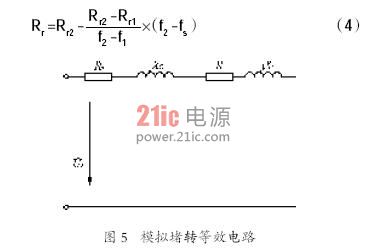
电机加上单相正弦电压时,没有电磁转矩发生,其电磁现象与三相堵转时根本相同,图5为模仿电机堵转的等效电路。当电流到达给定值后,在A、B 两相之间发生了一个基波频率为f,基波幅值为Um的正弦PWM电压。经过检测电压和电流信号之间的相位差兹,能够算出转子电阻为

在该检测进程中,正弦基波频率f的巨细对转子电阻辨识成果影响很大。若f较小,则Xm(电机励磁电抗)值变小,励磁支路的阻抗将不能忽视;若f较大,
则集肤效应的影响严峻,导致辨识转子电阻偏大。选用在f1=20 Hz 和f2=40 Hz两个频率点进行单相短路实验,得到转子电阻值Rr1、Rr2。近似以为集肤效应的
影响与频率成线性关系,则可经过对电阻值Rr1、Rr2选用两点法,核算出额外转差频率fs(1 ~4 Hz)处的转子电阻,以此作为真实的转子电阻值
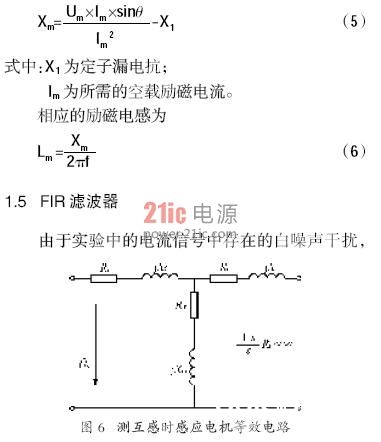
1.4 互感辨识
电机空载时转差s=0,这时等值电路变成图6所示电路。逆变器供电下的空载实验与惯例电机学实验十分相似。选用V/f 操控方法,使电机不带任何负载运行在频率f下,然后检测出电压和电流信号之间的相位差兹。这样就能够依照辨识转子电阻实验的核算办法得到异步电机空载等效电路中的电抗了。电机励磁电抗为
会对相位的检测形成较大的影响,所以需求对采样的电流信号进行低通滤波处理。考虑到基波信号的最大频率值为50 Hz,且需求知道信号的准确的相位信息,所以规划的滤波器截止频率为100 Hz,是具有线性相移的FIR 滤波器,阶数为50 阶,图7 为该滤波器的幅频相频特性。