图中所示的电路是一个三位转速计,用来丈量重复时刻距离为0.235至15秒内的低频信号。转速计的转速为每分钟4至255转,它使用在那些医疗设备,这些医疗设备中,用来丈量心跳率、呼吸率、电解磨削、脑电图、低转速电机转速或机械设备转速之类的低频信号。
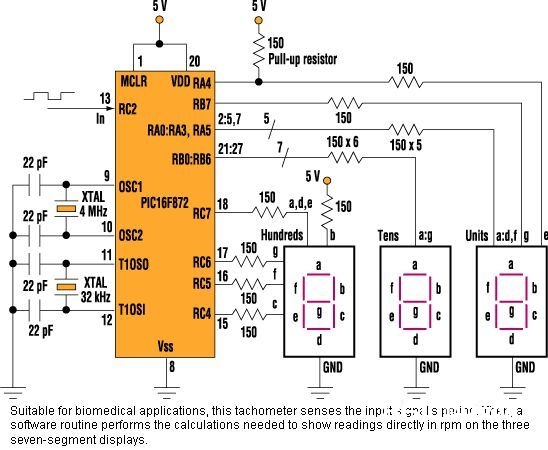
PIC16F872微处理操控处理转速计的数据。PIC感应输入频率(fin)的周期,核算出每秒发生的相应的脉冲数,并相应的更新LED显现器。输入信号需被预处理成0到5V的直流电压,脉冲高电平的宽度至少为4μs。
MCU所用等式为RPM = 60/T。T指感应输入的周期,常数60代表一分钟(60秒内)脉冲的读数或每分钟的旋转数。该电路的时刻基准是出一个32kHz的晶振(爱普生C-001R32.768K-A ±20 ppm)来供给的,这个时刻基数反过来触发T1(PIC的内部定时器)。T1有一个可编程的已将其设为1/8的因子。这一因子产一个4 kHz的分频。定时器T1为16位的定时器,发生一个0.00025秒(250 μs)的改变周期。
定时器T1经过软件被输入端RC2的输入信号的上升沿使能。当下一个上升沿到来时,T1被制止。这样,T1就有了一个与输入信号周期对应的二进制计数。因其改变周期为0.00025秒(250 μs),咱们有必要将其右移三位以取得0.25秒的时刻。这样,新的rpm等式将为RPM = 60000/T。
表中显现怎么取得转数/分(rpm)读数,从包含了周期读数的计数器(T1)开端。例如,若PIC检测到一个周期为1秒的信号,由于内部频率分配器被设为4,所以计数器的读数将等于1000(十进制)。这个信号的终究rpm读数将等于60。
它是这样作业的:PIC监测输入端RC2,等候一个下降沿。当检测下降沿时,定时器T1被TMR1ON位使能。然后,PIC等候下一个定时器T1。当下一个定时器T1到来时,P%&&&&&%制止TMR1ON位以中止读数。这时,各自周期的读数被存于寄存器TMR1H和TMR1L中。
为防止规模外的读数,需求检测溢出位TMR1F。假如该位被设置了,则标明信号的周期太长致使不能被丈量。在这种情况下,程序跳至UNDF标位,显现“OUF”或overflow信息。这标明输入信号的周期比16.384秒要高。
若没有溢出,咱们就要校验检测周期,使其等于或高于940(相当于 255 rpm)。假如读数低于940,程序就要跳到OVERF标位,显现信息将为”00F”,这标明读数高于255 rpm。
若这一值大于940,则使用惯例DIVS被4除。DIVS带有发生两个16位数字的两对寄存器(ACCb和 ACCa)。为了取得这一周期,所用公式为ACCb/ACCa = ACCb,60,000 (EA60H)再一次使用惯例DIVS被ACCb除。这样咱们就得到了二进制的rpm值。咱们有必要将这个二进制转换为BCD码。
为了完结这一操作,咱们将读数转移至W,然后调用惯例的BINBCE。BINBCE经过寄存器R0, R1, 和R2(R2是最具含义的信号数)将二进制转换为BCD码。最终,将每一个寄存器内的数据转换成七段码,使之能在LED显现屏上显现。两个核算表SEGM 和 SEGM2完结这个七段码操作,其间SEGM2负责处理百位数位。