对杂乱的工厂环境来说,不管是人工操作仍是机器操作,安全都是不容忽视的问题。依据AGV小车在工厂的运用,AGV小车避障体系直接关系到AGV小车在运转进程的安全。

这种移动机器人之所以智能,其主要便是自主导航,而完成机器人自主导航有个基本要求——避障。下面让我们来了解一下移动机器人的避障,避障是指移动机器人依据收集的障碍物的状况信息,内行走进程中经过传感器感知到阻碍其通行的静态和动态物体时,依照必定的办法进行有效地避障,最终到达目标点。
从20世纪70年代末开端,跟着计算机的运用和传感技能的开展,以及新的机器人导航算法的不断推出,移动机器人研讨开端进入快车道。

完成避障与导航的必要条件是环境感知,在不知道或者是部分不知道的环境下避障需求经过传感器获取周围环境信息,包含障碍物的尺度、形状和方位等信息,因而传感器技能在移动机器人避障中起着十分重要的效果。
避障运用的传感器主要有超声传感器、视觉传感器、红外传感器、激光传感器等。

红外测距传感器的丈量原理是当红外发射器依照必定的视点发射红外光束,发射管的发射信号,经过检测物反射回接收管。接收到的发射信号与接收到的补偿信号之间有必定的相位差,即时刻延时,检测物间隔传感器越近,相位差越小,推迟的时刻也越小。光子行进的间隔=光速*光子行进的时刻,而光子行进的时刻与相位差成正比,由此就可以依据相位差计算出光信号行进的往复旅程,然后计算出传感器距检测物的间隔。
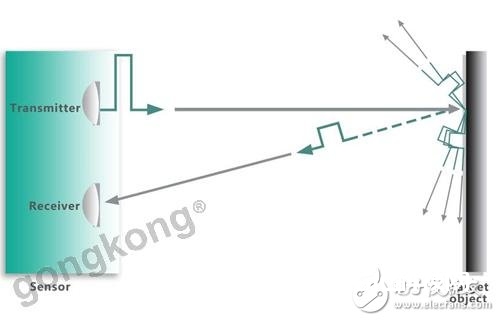
而红外传感器的长处更是恣意装置视点赋予的空间很大,检测的规模0.15米到达12米,关于不同布景色彩也是能轻松的处理,在-65℃的恶劣温度下照样能检测,抗振荡能力强。
责任编辑;zl