导言
跟着微机电和惯性技能的开展,MEMS惯性器材技能越来越老练,MEMS陀螺以其功能高、尺度小、能耗低、可靠性高、重量轻、价格低一级长处,在低成本姿势丈量体系中的运用越来越广泛。但MEMS陀螺受制作工艺的约束,与传统工艺制作的惯性陀螺比较,在遭到温度、外围电路的影响时,输出数据存在较大的随机噪声,影响其丈量精度。为了下降随机噪声对体系丈量精度的影响,有必要依据很多的陀螺实践丈量数据,树立精确的随机噪声模型,依据噪声模型挑选合理有用的办法进行滤波补偿,进步体系的丈量精度。在近几年MEMS陀螺的运用过程中,陀螺随机噪声模型树立的办法首要有小波剖析、神经网络和时刻序列剖析法,滤波办法则是依据模型打开必定的数据处理,针对以上建模办法选用的首要滤波技能有质子滤波、鲁棒滤波、Kalman滤波以及改善滤波技能等[46]。
MEMS陀螺在姿势丈量体系的实践运用中,为了实时收集体系的姿势信息,数据收集、处理、解算有必要满意体系的实时性要求,小波剖析、神经网络等办法树立的噪声模型一般具有较高的阶数,难以工程完成和满意体系的实时性要求。选用时刻序列剖析法,经过对陀螺随机噪声的AR建模,能够有用地树立惯例陀螺的随机噪声模型。本文以小型无人机姿势丈量体系运用为布景,依据体系规划中MEMS陀螺的实践测验数据,具体研讨了针对其随机噪声数据的建模办法和Kalman滤波办法。
1陀螺差错建模
1.1原始数据收集
体系主操控器经过串行数据接口SPI与MEMS陀螺通讯,陀螺角速率采样周期为20ms,在陀螺停止状况下进行20min的实验数据收集,图1为陀螺z轴在零点时的噪声原始数据,共10000组采样数据。

经过对MEMS陀螺噪声原始数据的剖析能够得知,噪声包括随机漂移重量和常值项,去掉噪声中的常值项,所得的噪声样本序列是一个随机时刻序列。依据时刻序列剖析办法对随机时刻序列样本进行建模,该模型能够用来迫临实在的噪声数据,用时刻序列模型对陀螺噪声进行预告,然后选用滤波技能去除噪声特性,进步体系丈量精度[79]。
1.2数据预处理
MEMS陀螺噪声原始数据中包括常值重量和随机重量。常值重量能够经过均值办法提取,陀螺短时刻作业时,能够经过这一办法进行补偿,长时刻作业时,需求考虑本身的常值漂移量,简略地选用均值办法去除常值重量,无法得到有用的随机漂移序列。经过对陀螺丈量数据进行剖析,考虑陀螺原始数据采样周期和陀螺数据运用周期,本文选用实时移动均匀算法对陀螺原始数据进行处理,以实时收集值和前面9个采样点的均匀值作为当时时刻常值重量。采样点数的挑选需求考虑实践运用的实时性和陀螺常值漂移特性,点数太少,则均匀作用欠好;点数太多,则直接影响陀螺丈量的实时性,在无人机姿势操控中,直接影响体系的机动性和稳定性。
去除常值后的序列即为MEMS陀螺的随机噪声信号,是时刻序列剖析建模目标,在建模之初,对预处理后的MEMS陀螺仪随机噪声信号的平稳性、正态性进行判别,以确认预处理后的数据的确契合时刻序列的建模要求。
1.3陀螺差错建模
经过数据预处理,对陀螺噪声数据进行时刻序列建模,本文结合工程实践运用,考虑体系的实时性、适用性,结合考虑AIC原则,确认选用时刻序列剖析法的AR模型对陀螺随机噪声进行建模。
AR(p)模型一般格局为:
其间ap为模型回归系数,x(k)为模型输出,w(k)为模型噪声序列,p为模型阶数。
依据AIC最小标精确认陀螺漂移的数学模型,经过陀螺噪声特性的实验数据剖析,挑选AIC值最小的AR(1)作为陀螺漂移的模型。
陀螺AR(1)模型为:
x(k)=a1x(k-1)+w(k)(2)
其间a1为模型回归系数,x(k)为丈量值,w(k)为噪声序列。
AR(1)模型回归系数a1能够经过陀螺在停止状况下测得的10000组噪声数据核算得到,经过MATLAB软件中Yule-Walker核算办法,得模型回归系数a1=0.77。
2卡尔曼滤波
2.1卡尔曼滤波方程的树立
Kalmann滤波在随机信号处理过程中依据体系噪声和观测噪声特性,以体系的观丈量作为滤波器的输入,以所要估量值作为滤波器的输出,滤波器依据状况方程和观测方程估量出所需求的处理数据,在工程运用中简略且易于完成,是一种实时递推的最优估量办法。本文在树立陀螺噪声模型的基础上,以实验数据为体系观丈量,选用Kalman滤波办法对陀螺噪声进行滤波。
依据树立的一阶AR(1)模型,经过离散Kalman滤波对陀螺采样数据进行最优估量,其状况方程为:
设Vk为丈量噪声序列,则体系的观测方程为:
Zk=CXk+Vk(4)
式中C=[1,0];Xk为依据陀螺采样数据取得的状况估量值,Wk为体系噪声,Zk为陀螺噪声丈量值,Vk为观测噪声。依据陀螺停止状况的实验特性,可假定其体系噪声Wk和观测噪声Vk(k=0,1,2,3,…)的数学计算特性为E(Vk)=E(Wk)=0。
2.2滤波递推公式
依据状况方程、观测方程和Kalman滤波递推公式,能够得到整个体系的滤波算法。滤波器的输入Zk为零漂数据,设初始条件P0为二阶单位阵,0为[0,0]T。
实时状况猜测阵:
k/k-1=Φk-1
协方差阵一步猜测为:
Pk/k-1=ΦPk-1Φ+HQHT
滤波增益:
Kk=Pk/k-1CT(CPk/k-1CT+R)-1
状况估量:
k=k/k-1+Kk(ZK-Ck/k-1)
协方差阵估量更新:
Pk=(1-KkC)Pk/k-1
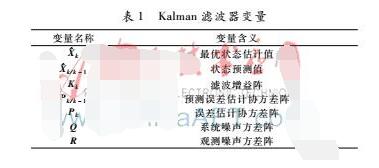
其间,各变量的含义如表1所示。
3数据剖析

经过MATLAB对实测数据进行Kalman滤波剖析,图2为Kalman滤波后陀螺仪零点数据输出曲线。陀螺噪声数据滤波前后的均值和方差见表2,滤波后噪声均值比滤波前减小30%,其方差与滤波前比较,小了1~2个数量级,经过均值和方差的剖析比较能够看出,根据陀螺噪声AR(1)模型采纳的Kalman滤波办法,能够有用下降陀螺噪声特性,其噪声涣散程度也显著地减小了。陀螺噪声虑波后的数据曲线如图2所示。经过比照图1与图2的陀螺噪声曲线,能够直观地看到滤波前后数据改变。
4定论
本文经过实验仿真研讨了MEMS陀螺的噪声特性,以实在的陀螺噪声数据为处理目标,规划实时性较好的数据预处理办法,对预处理后的数据选用时刻序列剖析法进行建模,经过Kalman滤波技能进行滤波处理。仿实在验标明,选用的噪声建模办法和滤波处理技能能够有用下降陀螺随机噪声特性,减小噪声随机涣散程度,进步陀螺在姿势丈量体系中的丈量精度,进步MEMS陀螺的运用价值。