


TOP1 无人机遥感操控渠道电路
无人机比较较卫星和载人航空飞机遥感渠道而言,具有本钱低、灵活性高的特色。为了满意科学遥感实验、完结遥感作业使命、和谐无人机电子吊舱中多组件作业、操控遥感印象传感器姿势,体系以AT89S52为主控芯片,扩展多路串口及USB接口以完结体系与外围设备的通讯,一起规划了相机驱动模块及三自由度步进电机驱动模块。经过无人机航空遥感实验证明该体系能够满意遥感实验要求。
USB接口扩展电路规划
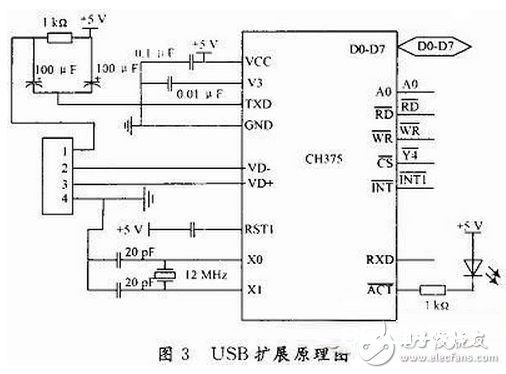
USB口扩展由CH375芯片完结。CH375是USB总线的通用接口芯片。它的首要特色是价格便宜、接口便利、可靠性高。支撑 USB-HOST主机办法和USB-DEVICE/SLAVE设备办法。CH375的USB主机办法支撑常用的USB全速设备,外部单片机需求编写固件程序依照相应的USB协议与USB设备通讯。可是关于常用的USB存储设备,CH375的内置固件能够主动处理Mass-Storage海量存储设备的专用通讯协议,通常状况下,外部单片机不需求编写固件程序.就能够直接读写USB存储设备中的数据。CH375和单片机的通讯有2种办法:并行办法和串行办法。USB扩展电路原理图如图3所示,CH375芯片设置为内置固件形式,运用12 MHz晶体。单片机P0口与CH375的D0~D7相连作为数据总线,译码器输出CH375的相连片选该芯片,单片机A0与CH375的A0相连,可挑选 CH375的地址或是数据输入与输出。当A0为高电平是D0~D7的传输的是地址,低电平时传输的是数据。P3.6和P3.7别离操控CH375的读写操作。CH375接单片机输入端,当稀有据经过USB口输入时发生中止信号,告诉单片机进行数据处理。当CH375芯片初始化后并成功与主机连通之后,指示灯亮。
步进电机驱动电路
安稳云台操控即为三自由度步进电机操控,即操控遥感传感器的俯仰角、横滚角和航向角使安稳云台坚持水平(或笔直)状况。步进电机驱动由THB6128芯片完结,单片机只需输出步进电机运转方向和脉冲信号即可到达操控步进电机的意图。
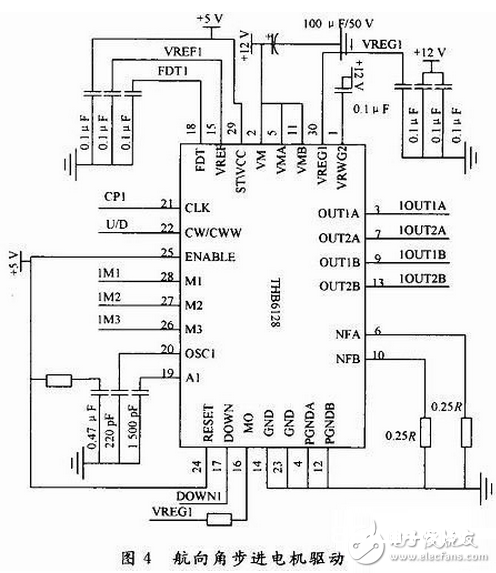
THB6128是高细分两相混合式步进电机驱动专用芯片,经过单片机输出操控信号,即可规划出高功用、多细分的驱动电路。其特色为双全桥 MOSFET驱动,低导通电阻Ron=0.55 Ω,最高耐压36 V,大电流2.2 A(峰值),多种细分可选,最高可达128细分,具有主动半流确定功用,快衰、慢衰、混合式衰减3种衰减办法可选,内置温度维护及过流维护。图4为航向角步进电机驱动电路,俯仰角、横滚角步进电机驱动与之相同。图中CP1与U/D别离为单片机给出的驱动脉冲与电机运转方向操控信号。M1,M2,M3为电机驱动细分数挑选信号输入,由拨码开关人为操控。FDT1与VREG1别离为衰减形式挑选电压与电流操控电压输入端。当3.5 V时为慢衰减形式;当为混合衰减形式;当FDT1《0.8 V时为快衰减形式。调整VREG1端电压即可设定步进电机驱动电流值。
CCD/相机驱动电路规划
CCD/相机驱动由单稳态触发器74LS221和光耦合器P521完结。74LS221既能够下降沿触发也可上升沿触发,且都能够制止输出。其输出的脉宽经过内部补偿取得而不受外部电压和安稳影响,在大多数运用中,脉宽只由外接的时控元件决议。CCD/相机驱动电路如图5所示。图示参数的单稳态触发器高电平持续时刻约为33 ms,可根据相机的实践曝光时刻的需求,改动电路的充电时刻常数RC来调度稳态时刻的长短。图中Camera为单片机P3.5口,当其为下降沿时,触发单稳态触发器输出高电平,此高电平作用于光耦合器P521的二极管端,然后触发三极管端导通,然后触发相机快门。P521的输出端串接一个10kΩ的电阻,避免导通时电流过大而损坏相机。

数据存储模块由AT24C512完结,单片机P3.0,P3.1口别离与AT24C512的SCL、SDL端口相连,并接入上拉电阻,模仿 I2C总线扩展 64 KB E2PROM数据存储器。SRAM扩展由IDT6116SA芯片完结,扩展2 KB用于缓存单片机核算进程中的暂时数据。体系输入电压为12 V直流电,电源模块选用7805与7805两片三端稳压器串接,下降单片稳压器两头的压降,取得平稳的+5 V电压。|
经过实验证明本体系能够较好的满意无人机航空遥感渠道机载作业操控的要求,能够和谐电子吊舱的各个组件作业,操控相机的姿势,实时下传机载作业数据,运用的I/O口较少,USB接口的扩展处理了当时许多笔记本电脑不具有COM口的问题,在野外实验时亦可及时的处理作业体系中的相片信息数据。单片机仍还有较多的资源能够运用,可便利体系的晋级,但一起也遭到微处理器数据处理才干的约束。
线下活动提示:【嵌入式运用技能沙龙】以火爆无人机为引,深窥嵌入式运用在四轴无人机电机操控中的技能办法。
无人机技能专题:让你了解最前端规划,详情请进入》》》

TOP2 嵌入式无人机操控体系硬件电路
在无人机飞翔操控体系中,飞翔操控器是其间心部件,它担任飞翔操控体系信号的收集、操控律的解算、飞机的姿势和速度,以及与地上设备的通讯等作业。跟着无人机越来越广泛的运用,它所完结的使命也越来越杂乱,对无人机的机动性要求也越来越高,这就要求无人机的操控中心向高集成度和小型化方向开展。本文以586-Engine 嵌入式芯片为中心,规划了某型无人机的飞翔操控器。根据AMD Elan SC520处理器的微操控模块,具有高可靠性、结构紧凑以及低功耗等特色,它一起具有功用强壮的调试软件。586-Engine的首要参数方针如下:
(1)CPU为32位AMD Elan SC520,主频为133MHz;(2)具有高功用的浮点运算单元,支撑正弦、正切、对数等杂乱运算,十分合适需求杂乱运算的运用。(3)配备512KB 的SRAM,512KB的Flash,114字节内部RAM;(4)支撑15个外部中止。共有7个定时器,包含一个可编程内部定时器,供给3个16位内部定时器和3个16位GP定时器,再加上一个软件定时器。这些定时器支撑外部事情的计时和计数。软件定时器供给微秒级的硬件时刻基准。(5)供给32路可编程I/O,2个UART.共有19路12位A/D输入,包含11路ADC串行输入和8路并行ADC,转化频率为300kHz;6路D/A输出,包含2个串行输出DAC和4个输出并行12位DAC,转化频率为200kHz。(6)作业温度为-40℃~80℃,尺度为91.4mm&TImes;58.4mm&TImes;7.6mm。
飞翔操控器硬件规划
该型无人机是为水兵野战部队供给通讯中继用处的中型轮式无人机,其飞翔操控器是一个独自装箱的小型航空机载电子设备,由DC/DC直流电源变换板、核算机主机板、模仿量通道板、开关量通道板和舵机操控板组成,悉数模板经过母板上的总线办法衔接,以减小尺度,进步集成度。
该飞翔操控器需求与GPS、磁航向计和无线电高度表等进行通讯,共需5个串口。而586-Engine主板只供给2个串口,别离供地上检测和测控电台运用,因而需求进行串口扩展。串口扩展电路如图3所示。
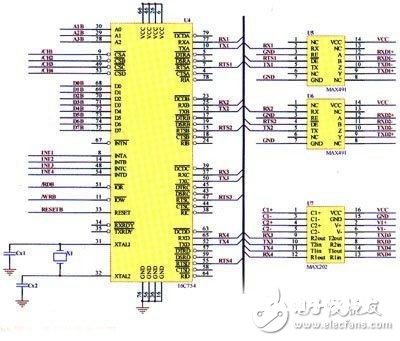
串口扩展电路中选用TL16C754四通道UART并-串转化器材,将8位并行数据转化成4路串行输出,外加MAX202和MAX489电平转化芯片,扩展了2个RS232串口和2个RS422串口,可满意飞翔操控器的硬件需求。
D/A转化硬件电路规划
此型无人机选用模仿舵机,共需6路D/A通道发生PWM信号来驱动舵机。586-Engine主板一共供给8路D/A,其间4路12位并行 D /A(DA7625)别离操控升降舵机、左右副翼舵机和方向舵机,2路12位串行D/A(LTC1446)操控前轮舵机和油门舵机。由于DA7625的输出电压规模为0~2.5V,LTC1446输出电压规模为0~4.096V,而舵机作业电压为-10~10V,因而需求对信号进行扩大和电平平移。D/A 电平平移电路如图所示。

由图可知,D/A电平转化原理是在运放输入端选用加法电路,将输入信号与基准电平份额相加,得到合适采样的电压规模。关于A/D收集,586- Engine主板上自带的19路12位的A/D接口彻底满意飞控体系通道数和转化精度的要求,这些A/D接口别离收集气压高度表的数据,无人机机载电压、发动机转速和温度、油门开度等。这些信号发往地上测控核算机,为操作人员对无人机作业状况进行监控供给了根底。关于I/O操控,586- Engine主板上供给了32个16位可编程数字I/O口,用于收集发动机发动信号、伞舱翻开信号等,并输出开关量信号操控其它设备,操控无人机起飞与收回进程。
电源模块硬件电路规划
飞翔操控器的电源模块电路给飞翔操控器供给洁净安稳的供电电压,用来确保飞翔操控器正常作业。电源模块电路的规划好坏直接影响飞翔操控器运转的安稳性和可靠性。该型无人机由于对尺度有必定的要求,一起考虑到可靠性与本钱,因而在规划时选用了老练的规范模块电源,外接少数器材即可作业。飞翔操控器供电模块电路如图5所示。
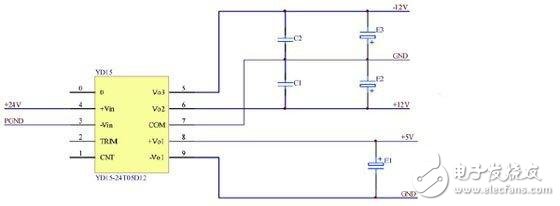
其间,选用24T05D12模块电源作为供电电路的主芯片,供给的功率为30W,输入电压规模为18V~36V,具有三路电源输出:+5V 和±12V,为机载传感器和舵机进行供电。嵌入式芯片的运用,减小了飞翔操控器的体积与重量,完结了飞翔操控器小型化、高集成度的规划方针;自行规划的串口扩展电路、舵机操控板等下降了研发本钱,满意了项目需求方的要求。能够预见,586-Engine特有的功用以及较高的性价比将在无人机飞翔操控范畴得到广泛的运用。
TOP3 UAV电源办理体系电路
由于在民用及国防等许多范畴中的广泛运用, 空中机器人技能现已越来越被人们所注重, 并招引了各国专家学者的留意。小型旋翼机器人是以模型直升机为载体, 配备上传感器单元, 操控单元和伺服机构等设备以完结自主飞翔。而为了进步飞机的安全性, 需求规划一套设备监测体系, 实时的监测飞机的姿势信息, 机载设备的状况以及电源的状况等。
该渠道所运用的电源是两节锂电池串联组成的电池组, 运用锂离子电池的充放电特性, 规划了一套以mega16l 为中心的充放电办理体系。锂电池具有体积小、能量密度高、无回忆效应、循环寿数高、高电压电池和自放电率低一级长处, 与镍镉电池、镍氢电池不太相同的是有必要考虑充电、放电时的安全性,以避免特性劣化。因而在体系运转进程中, 为了维护锂电池的安全, 规划了一套欠压维护电路, 以避免电源办理体系因过用而发生电池特性和耐久性特性劣化。
电源办理体系整体结构
无人机电源办理体系是飞机完结自主飞翔的重要组成部分, 其大致结构如图1 所示。在该体系中, 运用AXI 公司出产的2212/ 34 类型发电机将动能转化为220V 交流电, 再经过整流稳压后输出11.6V 的直流电压, 可由该输出电压为两节锂电池充电。电源办理体系的操控器是meg a161单片机, 该操控器经过检测两节锂电池的电压巨细然后操控继电器开关来对电池进行充放电办理。
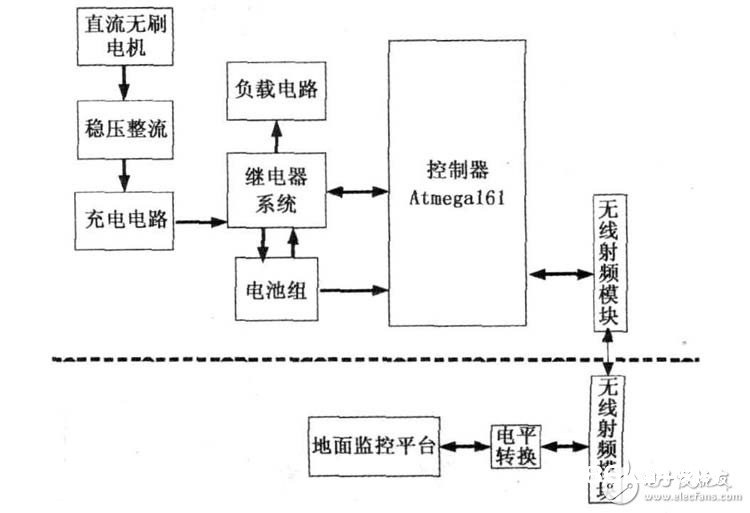
图1 电源办理体系结构
操控器收集到电源体系中的信息后, 经过无线传输设备将该数据实时传输给地上。地上监控渠道还能够发送一些指令给mega16l, 经过操控继电器开关来操控电池充放电, 然后完结监测和操控飞机的意图。机上电源模块由两节英特曼电池有限公司出产的锂电池组成, 电池组电量足够时电压为8?? 4V.电池的荷电量与整个供电体系的可靠性密切相关, 电池剩下电量越多, 体系的可靠性越高, 因而飞翔时能实时取得电池的剩下电量, 这将大大进步飞机的可靠性。
电源监控体系的完结
直升机能顺利完结飞翔使命, 足够的电源供给不可或缺。
由锂电池的特性可知, 在过度放电的状况下, 电解液因分化而导致电池特性劣化并形成充电次数下降。因而为了维护电池的安全, 电源体系在给操控体系供电前要经过欠压维护模块和稳压模块。为了猜测电源体系中剩下的电量, 这儿选用检测电源体系电压的办法, 在测得体系的电源电压后, 查找由放电曲线树立的数据库, 就能估量出电源体系中所剩下的电量。
单片机所需求的电源电压是2. 7 ~ 5.5V, 因而可为meg a16l 规划外部基准电压为2.5V, 该基准稳压电路如图2所示。所以体系要检测电池的电压, 需求将电池用电阻进行分压且最大分得的电压值不能超过2.5V.操控器测得的电压值乘上电压分压缩小的倍数后, 就能得到电源体系中的实时电压。时刻监测锂电池的用电状况, 避免电池过用现象呈现, 就能到达有用运用电池容量和延伸寿数的意图。
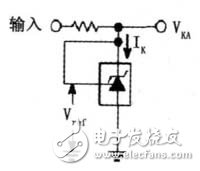
图2 基准电压电路
直流无刷电机电路
无刷直流电机是由电动机主体和驱动器组成, 是一种典型的机电一体化产品。直流无刷电机与一般直流电机具有相同的作业原理和运用特性, 而其组成是不相同的, 除了电机本身外, 前者还多一个换向电路, 直流无刷电动机的电机本身是机电能量转化部分, 它除了电机电枢、永磁励磁两部格外, 还带有传感器。该发电机的部分AC-DC 电路如图3 所示。
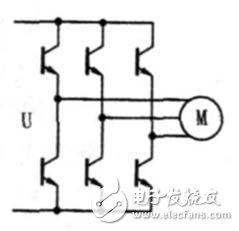
图3 无刷电机AC-DC 电路
充电电路
锂离子电池的充电特性和镍镉、镍氢电池的充电特性有所不同, 锂离子电池在充电时, 电池电压缓慢上升, 充电电流逐步减小, 当电压到达4.2V 左右时, 电压根本不变, 充电电流持续减小。因而关于改型充电器可先用先恒流后恒压充电办法进行充电, 详细充电电路如图4 所示。该电路选用LM2575ADJ 组成斩波式开关稳压器, 最大充电电流为1A.
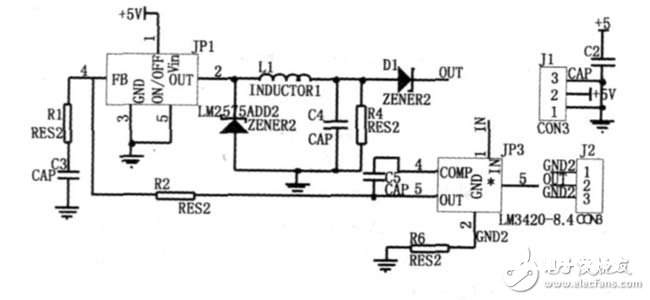
图4 高效开关型恒流/ 恒压充电器部分电路
该电路作业原理如下: 当电池接入充电器后, 该电路输出恒定电流, 对电池充电。该充电器的恒流操控部分由双运放LM358 的一半、增益设定电阻R3 和R4 、电流取样电阻R5 和1. 23V 反应基准电压源组成。刚接入电池后, 运放LM358 输出低电平, 开关稳压器LM2575-ADJ 输出电压高, 电池开端充电。当充电电流上升到1A 时, 取样电阻R5 (50m 欧) 两头压降到达50mV, 该电压经过增益为25 的运放扩大后, 输出1.23V 电压, 该电压加到LM2575 的反应端, 安稳反应电路。
当电池电压到达 8.4V 后, LM3420 开端操控LM2575ADJ 的反应脚。LM3420 使充电器转入到恒压充电进程, 电池两头电压安稳在8?? 4V.R6 、R7 和C3 组成补偿网络, 确保充电器在恒流/ 恒压状况下安稳作业。若输入电源电压中止, 二极管D2 和运放LM358 中的PNP 输入级反向偏置, 然后使电池和充电电路阻隔, 确保电池不会经过充电电路放电。当充电转入恒压充电状况时, 二极管D3 反向偏置, 因而运放中不会发生灌电流。
TOP4 电源欠压维护电路
电源欠压维护由锂电池的电池放电特性易知, 当电池处于3.5V 时, 此刻电池电量行将用完, 应及时给电池充电, 不然电池电压将急剧下降直至电池损坏。所以规划了一套欠压维护电路如图5 所示, 运用电阻分压所得和由TL431 规划的基准电压比较, 将比较成果送人LM324 扩大电路然后触发由三极管构成的开关体系, 然后操控负载回路的通阻。实验证明, 当体系电压到达临界风险电压7V 时, 体系的输出电流仅为4mA, 然后避免了体系锂电池过度放电现象的发生。
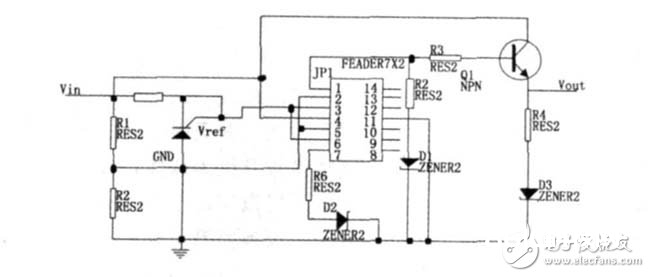
图5 欠压维护电路
由于锂离子电池能量密度高, 因而难以确保电池的安全性。在过度充电状况下, 电池温度上升后能量将过剩, 所以电解液分化而发生气体, 因内压上升而发生自燃或决裂的风险;反之, 在过度放电状况下, 电解液因分化导致电池特性及耐久性劣化, 然后下降可充电次数。该充电电路和本办理体系能有用的防治锂电池的过充和过用, 然后确保了电池的安全, 进步锂电池的运用寿数。
本文规划了一套UAV 电源办理体系, 该体系具有主动操控充放电办理, 实时监测电池电压等功用。该体系现现已过调试和实验验证了其可行性, 可是为了确保飞机安全, 还要做更多的实验以确保无人机自主飞翔的安全和安稳。除此之外, 高低频滤波, 电池电量猜测等也是重要的方向, 需求深化的研讨。现在, 锂电池的运用规模越来越广, 其价格也相对适中,假如把握先进的科学的运用办法, 让锂电池发挥应有的最大功效, 将会节约很多的资源和财富。
小型无人机飞控体系规划详解
小型无人机在现代军事和民用范畴的运用已越来越广泛。在阅历了前期的遥控飞翔后,现在其导航操控办法现已开展为自主飞翔和智能飞翔。导航办法的改动对飞翔操控核算机的精度提出了更高的要求;跟着小型无人机履行使命杂乱程度的添加,对飞控核算机运算速度的要求也更高;而小型化的要求对飞控核算机的功耗和体积也提出了很高的要求。高精度不只需求核算机的操控精度高,并且要求能够运转杂乱的操控算法,小型化则要求无人机的体积小,机动性好,然后要求操控核算机的体积越小越好。
在很多处理器芯片中,最合适小型飞控核算机CPU的芯片当属TI公司的TMS320LF2407,其运算速度以及很多的外围接口电路很合适用来完结对小型无人机的实时操控功用。它选用哈佛结构、多级流水线操作,对数据和指令一起进行读取,片内自带资源包含16路10位A/D转化器且带主动排序功用,确保最多16路有转化在同一转化期间进行,而不会添加CPU的开支;40路可独自编程或复用的通用输入/输出通道;5个外部中止;集成的串行通讯接口(SCI),可使其具有与体系内其他操控器进行异步(RS 485)通讯的才干;16位同步串行外围接口(SPI)能便利地用来与其他的外围设备通讯;还供给看门狗定时器模块(WDT)和CAN通讯模块。
飞控体系组成模块
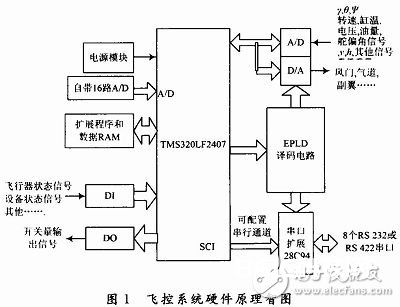
飞控体系实时收集各传感器丈量的飞翔状况数据、接纳无线电测控终端传输的由地上测控站上行信道送来的操控指令及数据,经核算处理,输出操控指令给履行机构,完结对无人机中各种飞翔模态的操控和对使命设备的办理与操控;一起将无人机的状况数据及发动机、机载电源体系、使命设备的作业状况参数实时传送给机载无线电数据终端,经无线电下行信道发送回地上测控站。依照功用区分,该飞控体系的硬件包含:主操控模块、信号调度及接口模块、数据收集模块以及舵机驱动模块等。详细的硬件构成原理如图1所示。
模块功用
各个功用模块组合在一起,构成飞翔操控体系的中心,而主操控模块是飞控体系中心,它与信号调度模块、接口模块和舵机驱动模块相组合,在只需求修正软件和简略改动外围电路的根底上能够满意一系列小型无人机的飞翔操控和飞翔办理功用要求,然后完结一次开发,多类型运用,下降体系开发本钱的意图。体系首要完结如下功用:
(1)完结多路模仿信号的高精度收集,包含陀螺信号、航向信号、舵偏角信号、发动机转速、缸温信号、动静压传感器信号、电源电压信号等。由于CPU自带A/D的精度和通道数有限,所以运用了别的的数据收集电路,其片选和操控信号是经过EPLD中译码电路发生的。
(2)输出开关量信号、模仿信号和PWM脉冲信号等能习惯不同履行机构(如方向舵机、副翼舵机、升降舵机、气道和风门舵机等)的操控要求。
(3)运用多个通讯信道,别离完结与机载数据终端、GPS信号、数字量传感器以及相关使命设备的通讯。由于CPU本身的SCI通道配备的串口不能满意体系要求,规划中运用多串口扩展芯片28C94来扩展8个串口。
体系软件规划
该体系的软件规区分为2部分,即逻辑电路芯片EPLD译码电路的程序规划和飞控体系的运用程序规划。
逻辑电路程序规划
EPLD 用来构成数字逻辑操控电路,完结译码和阻隔以及为A/D,D/A,28C94供给片选信号和读/写操控信号的功用。该软件的规划选用原理图输入和 VERILOG HDL言语编程的混合规划办法,遵从规划输入→规划完结→规划校验→器材编程的流程。体系运用了两片ispLSI1048芯片,别离用来完结对 A/D,D/A的操控和对串口扩展芯片28C94的操控。
体系运用程序规划
由于 C言语不光能够编写运用程序、体系程序,还能像汇编言语相同直接对核算机硬件进行操控,编写的程序可移植性强。由于以DSP为中心规划的体系中涉及到很多对外设端口的操作,以及考虑后续程序移植的作业,所以飞控体系的运用程序选用BC 3.1来规划,别离完结飞翔操控和飞翔办理功用。
软件依照功用区分为4个模块:时刻办理模块、数据收集与处理模块、通讯模块、操控律解算模块。经过时刻办理模块在毫秒级时刻内对无人机进行实时操控;数据收集模块收集无人机的飞翔状况、姿势参数以及飞翔参数、飞翔状况及飞翔参数进行遥测编码并经过串行接口传送至机载数据终端,经过无线数据信道发送到地上操控站进行飞翔监控;姿势参数经过软件内部接口送操控律解算模块进行解算,并将成果经过D/A通道送机载伺服体系,操控舵机运转,到达调整、飞机飞翔姿势的意图;通讯模块完结飞控核算机与其他机载外设之间的数据交换功用。
运用高速DSP操控芯片在操控律核算和数据处理方面的优势及其丰厚的外部资源,合作大规模可编程逻辑器材CPLD以及串行接口扩展芯片28C94规划小型机载飞控核算机,以其为中心规划的小型无人机飞控体系具有功用全,体积小,重量轻,功耗低的特色,很好地满意了小型无人机对飞控核算机高精度、小型化、低本钱的要求。该规划已成功运用于某验证无人机体系。
TOP5 无人机技能各模块详解与技能剖析
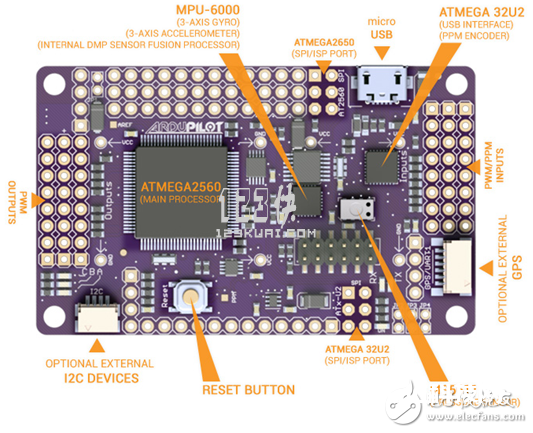
现在无人机成为了展会最大的抢手之一,大疆(DJI)、Parrot、3D RoboTIcs、AirDog等闻名无人机公司都有展现他们的最新产品。乃至是英特尔、高通的展位上展出了通讯功用强壮、能够主动避开障碍物的飞翔器。无人机在2015年现已迅速地成为现象级的抢手产品,乃至咱们之前都没有来得及细细研讨它。与固定翼无人机比较,多轴飞翔器的飞翔愈加安稳,能在空中悬停。主机的硬件结构及规范的遥控器的结构图如下图。

四轴飞翔器体系解析图

遥控器体系解析图
以上仅仅规范产品的解剖图,有些愈加高档的如针对航模本站和航拍用户们的无人机体系,还会要求有云台、摄像头、视频传输体系以及视频接纳等更多模块。
飞控的大脑:微操控器
在四轴飞翔器的飞控主板上,需求用到的芯片并不多。现在的玩具级飞翔器还仅仅简略地在空中飞翔或逗留,只需能够接纳到遥控器发送过来的指令,操控四个马达带动桨翼,根本上就能够完结飞翔或悬停的功用。意法半导体高档商场工程师介绍,无人机/多轴飞翔器首要部件包含飞翔操控以及遥控器两部分。其间飞翔操控包含电调/马达操控、飞机姿势操控以及云台操控等。现在干流的电调操控办法首要分红BLDC方波操控以及FOC正弦波操控。
高通和英特尔推的飞控主芯片
CES上咱们看到了高通和英特尔展现了功用更为丰厚的多轴飞翔器,他们选用了比微操控器(MCU)更为强壮的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。例如,高通CES上展现的Snapdragon Cargo无人机是根据高通Snapdragon芯片开宣布来的飞翔操控器,它有无线通讯、传感器集成和空间定位等功用。Intel CEO Brian Krzanich也亲安闲CES上演示了他们的无人机。这款无人机选用了“RealSense”技能,能够建起3D地图和感知周围环境,它能够像一只蝙蝠相同飞翔,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特尔的“RealSense”3D摄像头,以及选用了四核的英特尔凌动(Atom)处理器的PCI- express定制卡,来处理间隔远近与传感器的实时信息,以及怎么避免近间隔的障碍物。这两家公司在CES展现如此强壮功用的无人机,一是看好无人机的商场,二是美国行将推出相关法规,对无人机的飞翔将有严厉的管控。
Paul Neil说:xCORE多核微操控器拥稀有量在8到32个之间的、频率高达500MHz 的32位RISC内核。xCORE 器材也带有Hardware Response I/O接口,它们可供给杰出的硬件实时I/O功用,一起随同很低的推迟。“这种多核处理计划支撑彻底独登时履行体系操控与通讯使命,不发生任何实时操作体系(RTOS)开支。xCORE微操控器的硬件实时功用使得咱们的客户能够完结十分准确的操控算法,一起在体系内无颤动。xCORE多核微操控器的这些长处,正是招引比如无人机/多轴飞翔器这样的高可靠性、高实时性运用用户的要害之处。”多轴飞翔器需求用到四至六颗无刷电机(马达),用来驱动无人机的旋翼。而马达驱动操控器便是用来操控无人机的速度与方向。原则上一颗马达需求配备一颗8位MCU来做操控,但也有一颗MCU操控多个BLDC马达的计划。
多轴无人机的EMS/传感器
于用 MEMS传感器丈量视点改变,一般要挑选组合传感器,既不能单纯依靠加速度计,也不能单纯依靠陀螺仪,这是由于每种传感器都有必定的局限性。比如说陀螺仪输出的是角速度,要经过积分才干取得视点,可是即便在零输入状况时,陀螺依然是有输出的,它的输出是白噪声和慢变随机函数的叠加,受此影响,在积分的进程中,必然会引入累计差错,积分时刻越长,差错就越大。这就需求加速度计来校对陀螺仪,由于加速度计能够运用力的分化原理,经过重力加速度在不同轴向上的重量来判别倾角。由于没有积分差错,所以加速度计在相对停止的条件下能够校对陀螺仪的差错。但在运动状况下,加速度计输出的可信度就要下降,由于它丈量的是重力和外力的合力。较常见的算法便是运用互补滤波,结合加速度计和陀螺仪的输出来算出视点改变。

ADI亚太区微机电产品商场和运用司理表明,ADI产品首要的优势便是在各种恶劣条件下,均可取得高精度的输出。以陀螺仪为例,它的抱负输出是只呼应角速度改变,但实践上受规划和工艺的约束,陀螺对加速度也是灵敏的,便是咱们在陀螺仪数据手册上常见的deg/sec /g的方针。关于多轴飞翔器的运用来说,这个方针尤为重要,由于飞翔器中的马达一般会带来较激烈的振荡,一旦减震操控欠好,就会在飞翔进程中发生很大的加速度,那势必会带来陀螺输出的改变,然后引起视点改变,马达就会误动作,最终给终端用户的直观感觉便是飞翔器并不平稳。
跟着无人机的功用不断添加,GPS传感器、红外传感器、气压传感器、超声波传感器越来越多地被用到无人机上。计划商现已在运用红外和超声波传感器来开宣布可主动避撞的无人机,以满意将来相关法规的要求。集成了GPS传感器的无人机则能够完结一键归航功用,避免无人机飞翔丢掉。而内置了GPS功用的无人机,能够在软件中设置挨近机场或航空约束的灵敏地址,不让飞机起飞。






